












Mokyti roboto naujų įgūdžių, kuriems buvo reikalinga kodavimo kompetencija. Tačiau naujos kartos robotai gali išmokti iš bet ko.
Inžinieriai kuria robotų pagalbininkus, kurie gali „mokytis iš demonstracijos“. Ši natūralesnė treniruočių strategija suteikia galimybę asmeniui vadovauti robotui atliekant užduotį, paprastai vienu iš trijų būdų: per nuotolinio valdymo pultą, pavyzdžiui, vairasvirtę, kad nuotoliniu būdu manevruotų robotą; fiziškai perkeldamas robotą per judesius; Arba patys atlikdamas užduotį, kol robotas stebi ir imituoja.
Robotai mokymasis paprastai treniruojasi tik viename iš šių trijų demonstracinių metodų. Tačiau Masačusetso technologijos instituto (MIT) inžinieriai (MIT) dabar sukūrė trijų viename mokymo sąsają, leidžiančią robotui išmokti užduotį per bet kurį iš trijų mokymo būdų. Sąsaja yra delninės, jutikliais įrengto įrankio, kuris gali pritvirtinti prie daugelio įprastų robotų robotų. Žmogus gali panaudoti priedą, kad išmokytų robotą atlikti užduotį, nuotoliniu būdu kontroliuodamas robotą, fiziškai manipuliuodamas juo arba parodydamas užduotį patys – atsižvelgiant į tai, kuris stilius jiems labiau patinka ar geriausiai tinka užduotims.
MIT komanda išbandė naują įrankį, kurį jie vadina „universalia demonstracine sąsaja“, ant standartinės bendradarbiavimo robotinės rankos. Savanoriai, turintys gamybos patirties, naudojo sąsają, kad atliktų dvi rankines užduotis, kurios dažniausiai vykdomos gamyklos grindyse.
Tyrėjai sako, kad naujoji sąsaja suteikia didesnį mokymo lankstumą, kuris galėtų išplėsti vartotojų tipą ir „mokytojus“, kurie bendrauja su robotais. Tai taip pat gali leisti robotams išmokti platesnį įgūdžių rinkinį. Pavyzdžiui, asmuo galėtų nuotoliniu būdu išmokyti robotą tvarkyti toksiškas medžiagas, o toliau – gamybos linijoje, kitas asmuo galėjo fiziškai judinti robotą per bokso judesius aukštyn, o linijos pabaigoje kažkas kitas galėjo panaudoti priedą, kad nupieštų įmonės logotipą kaip robotą ir mokosi daryti tą patį.
„Mes stengiamės sukurti labai intelektualius ir kvalifikuotus komandos draugus, kurie galėtų efektyviai dirbti su žmonėmis, kad atliktų sudėtingą darbą“, – sakė Mike'as Hagenowas, MIT postdokumas MIT Aeronautikos ir astronautikos skyriuje. „Mes tikime, kad lankstūs demonstravimo įrankiai gali padėti toli už gamybos grindų ribų, kitose srityse, kuriose tikimės, kad padidės robotų priėmimas, pavyzdžiui, namų ar globos vietų.“
„Hagenow“ pateiks dokumentą, kuriame išsamiai aprašoma naujoji sąsaja, spalio mėn. IEEE intelektualių robotų ir sistemų (IROS) konferencijoje. Straipsnio MIT bendraautoriai yra DiMosthenis Kontogiorgos, MIT informatikos ir dirbtinio intelekto laboratorijos (CSAIL) postdoc; Yanwei Wang PhD '25, kuris neseniai įgijo elektros inžinerijos ir informatikos daktaro laipsnį; ir Julie Shah, MIT profesorė ir Aeronautikos ir astronautikos katedros vadovė.
MIT sukurtas delninis įrenginys, kuris gali būti naudojamas mokyti naujų robotų įgūdžių. | Kreditas: MIT
Treniruotės kartu
„Shah“ grupė „MIT Design“ robotuose, kurie gali dirbti kartu su žmonėmis darbo vietoje, ligoninėse ir namuose. Pagrindinis jos tyrimų pagrindinis dėmesys skiriamas sistemoms, leidžiančioms žmonėms mokyti robotų naujų užduočių ar įgūdžių „į darbą“. Pavyzdžiui, tokios sistemos padėtų greitai ir natūraliai pakoreguoti roboto manevrus, kad pagerintų savo užduotį, o ne pristabdydamos roboto programinę įrangą perprogramuoti nuo nulio – įgūdžių, kuriuos darbuotojas nebūtinai turi.
Naujasis komandos darbas remiasi kylančia robotų mokymosi strategija, vadinama „Mokymasis iš demonstracijos“ arba LFD, kai robotai yra skirti treniruotis natūraliau, intuityviai. Žvelgdami į LFD literatūrą, Hagenowas ir Shahas nustatė, kad iki šiol sukurti LFD mokymo metodai paprastai patenka į tris pagrindines teleoperacijos, kinestezijos mokymo ir gamtos mokymo kategorijas.
Vienas treniruočių metodas gali veikti geriau nei kiti du asmenims ar užduotims. Shahas ir Hagenovas svarstė, ar jie gali suprojektuoti įrankį, kuriame derinami visi trys metodai, kad robotas galėtų išmokti daugiau užduočių iš daugiau žmonių.
„Jei galėtume suburti šiuos tris skirtingus būdus, kaip kažkas gali norėti bendrauti su robotu, tai gali suteikti naudos skirtingoms užduotims ir skirtingoms žmonėms“, – teigė Hagenow.
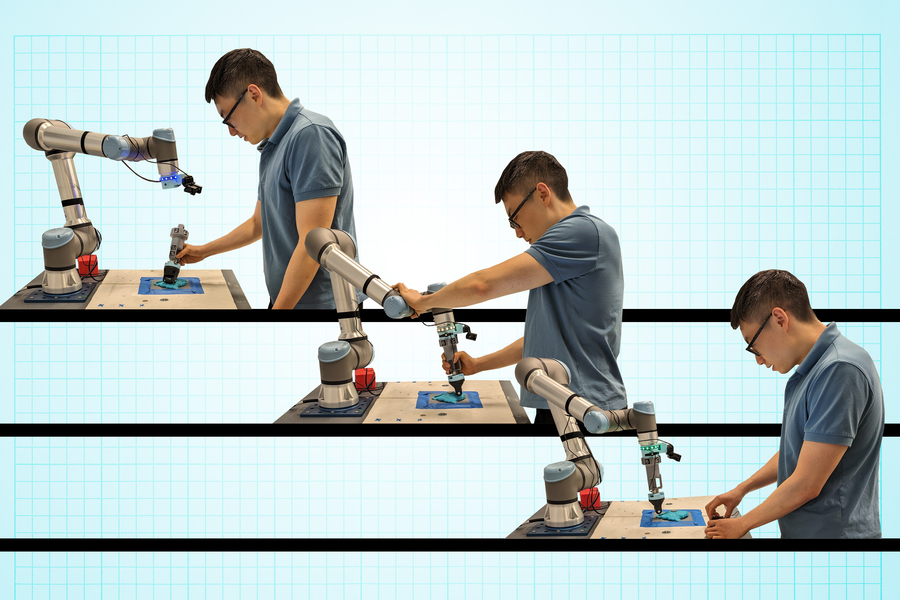
MIT sukūrė delninę sąsają, leidžiančią išmokyti naujų robotų įgūdžių, naudojant bet kurį iš trijų mokymo būdų: natūralų mokymą (viršuje kairėje), kinestezijos mokymą (vidurį) ir teleoperaciją. | Kreditas: MIT
Užduotys po ranka
Turėdama omenyje šį tikslą, komanda sukūrė naują universalią demonstracinę sąsają (VDI). Sąsaja yra delninis priedas, kuris gali tilpti ant tipiškos bendradarbiavimo robotinės rankos rankos. Priede yra fotoaparatas ir žymekliai, kurie stebi įrankio padėtį ir judesius bėgant laikui, kartu su jėgos jutikliais, kad būtų galima išmatuoti tam tikros užduoties metu esančio slėgio kiekį.
Kai sąsaja pridedama prie roboto, visą robotą galima valdyti nuotoliniu būdu, o sąsajos kamera registruoja roboto judesius, kuriuos robotas gali naudoti kaip mokymo duomenis, kad išmoktų užduotį. Panašiai asmuo gali fiziškai judinti robotą atlikdamas užduotį, pridedant sąsają. VDI taip pat gali būti atskirtas ir fiziškai laikomas asmuo, kad atliktų norimą užduotį. Kamera įrašo VDI judesius, kuriuos robotas taip pat gali naudoti, norėdamas imituoti užduotį, kai VBI vėl pritvirtinamas.
Norėdami patikrinti priedų pritaikomumą, komanda kartu su bendradarbiavimo robotine ranka atnešė sąsają su vietiniu inovacijų centru, kuriame gamybos ekspertai sužino ir išbando technologijas, kurios galėtų pagerinti gamyklos grindų procesus. Tyrėjai nustatė eksperimentą, kuriame jie paprašė centro savanorių naudoti robotą ir visus tris sąsajos treniruočių metodus, kad atliktų dvi įprastas gamybos užduotis: spaudos pritaikymą ir liejimą. Pritvirtindamas prie preso, vartotojas išmokė robotą paspausti ir pritvirtinti kaiščius į skylutes, panašias į daugelį tvirtinimo užduočių. Formavimui savanoris išmokė robotą stumti ir suvynioti guminę, į tešlą panašią medžiagą tolygiai aplink centrinio strypo paviršių, panašų į kai kurias termomoldavimo užduotis.
Kiekvienai iš dviejų užduočių savanorių buvo paprašyta naudoti kiekvieną iš trijų treniruočių metodų, pirmiausia robotą, naudodamiesi vairasvirčiu, tada kinestetiškai manipuliuodami robotu, ir galiausiai atsiribokite nuo roboto priedo ir naudojant jį „natūraliai“, atlikdami užduotį, kai robotas užfiksavo tvirtinimo jėgą ir judesius.
Tyrėjai nustatė, kad savanoriai paprastai pirmenybę teikė natūraliam metodui, o ne teleoperacijai ir kinestezijos mokymui. Vartotojai, kurie visi buvo gamybos ekspertai, pasiūlė scenarijus, kuriuose kiekvienas metodas gali turėti pranašumų, palyginti su kitais. Pavyzdžiui, teleoperacija gali būti geriau mokant robotą, kad būtų galima valdyti pavojingas ar toksiškas medžiagas. Kinestetiniai mokymai galėtų padėti darbuotojams pakoreguoti roboto, kuriam pavesta perkelti sunkius paketus, padėties nustatymui. Natūralus mokymas galėtų būti naudingas demonstruojant užduotis, kuriose yra subtilūs ir tikslūs manevrai.
„Įsivaizduojame, kad naudojate savo demonstracinę sąsają lanksčioje gamybos aplinkoje, kur vienas robotas gali padėti atlikti įvairias užduotis, kurioms naudingi konkretūs demonstracijų tipai“, – sakė Hagenowas, kuris planuoja patikslinti priedo dizainą, pagrįstą vartotojo atsiliepimais, ir naudos naują dizainą robotų mokymosi išbandymui. „Mes manome, kad šis tyrimas parodo, kaip didesnis bendradarbiavimo robotų lankstumas gali būti pasiektas per sąsajas, kurios išplečia būdus, kuriais galutiniai vartotojai sąveikauja su robotais mokymo metu.“
Redaktoriaus pastaba: Šis straipsnis buvo pakartotinai paskelbtas iš „MIT News“.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}