











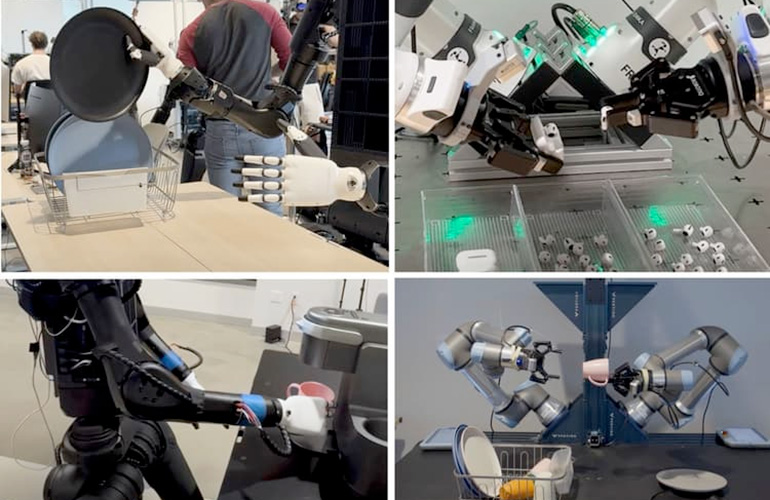
„Skild“ AI naujausią vaizdą pristatė apibendrintoms robotikos smegenims. Bendrovė siekia pateikti bendrosios paskirties smegenis, vadinamos „Skild“ smegenimis, galinčiomis kontroliuoti įvairius robotus įvairiose aplinkose ir užduotyse. Naujas vaizdo įrašas (žiūrėjimas aukščiau) pabrėžia ankstyvą bendrovės pažangą šioje kelionėje.
Fizinė AI parodo dirbtinio intelekto (AI) konvergenciją su fizinėmis sistemomis, tokiomis kaip robotai, kurie gali jausti, veikti ir mokytis realaus pasaulio aplinkoje. Tai suteikia galimybę intelektualiems agentams apdoroti duomenis, priimti sprendimus ir fiziškai sąveikauti su savo aplinka. Fizinės AI svarba kyla iš jos sugebėjimo užpildyti spragą tarp AI programinės įrangos ir apčiuopiamo veiksmo fiziniame pasaulyje.
„Robotiką kankina Moraveco paradoksas: Sunkios problemos yra lengvos, o lengvos problemos yra sunkios. Daugybė dabartinių robotikos modelių sutelkia dėmesį į užduotis, kurios žmonėms yra sunkiai ir lengvai robotai: šokiai, kung-fu, nes jie yra laisvos erdvės veiksmai ir nereikalauja jokio apibendrinimo“,-teigė Deepak Pathak, generalinis direktorius ir bendrajame „Skild AI“. „Slidinėjimo AI modeliai gali ne tik išspręsti šias lengvas užduotis, bet ir išspręsti kasdienes sunkias užduotis, tokias kaip laipiojimo laiptai net prieštaringomis sąlygomis, arba surinkti smulkiagrūdžius daiktus, kuriems reikalingas regėjimas ir samprotavimai apie kontaktinę dinamiką“.
Praėjo šiek tiek daugiau nei metai, kai įmonė uždarė 300 mln. Tuo metu įmonė išaugo iki daugiau nei 25 darbuotojų ir iš viso surinko 435 mln. USD per du finansavimo turus.
Kelios kitos pastebimos įmonės taip pat pradeda fizinius AI sprendimus. Fizinis intelektas, įkurtas Berkeley profesoriaus Sergejaus Levine'o, vejasi tą patį galutinį tikslą: vieno roboto vieno smegenų/pamatų modelį.
Robovusiness 2025 tyrinėja fizinę AI
Fizinė AI bus pagrindinė „Robobusiness“ tema (spalio 15-16 d Roboto ataskaita. „Deepu Talla“, „Nvidia“ viceprezidentas robotikos ir Edge AI, pristatys pradinį pagrindinį pranešimą, pavadintą „Fizinė AI naujajai robotikos erai“. Jis ištirs fizinės AI reikalavimus, kai modeliai gali suvokti, pagrįsti ir veikti realaus pasaulio aplinkoje.
Kiti pokalbiai apie fizinę AI bus:
Kaip kelių modelių sprendimų agentai pagerina našumą, saugą, mastą
Kalbėtojas: Robertas Sunas, „Dexterity“ įkūrėjas
Kaip AI pagerina ABB roboto našumą
Kalbėtojas: Thomas-Tianwei Wang, pagrindinis AI programų inžinierius, ABB robotika
„Sim2real“ stiprinimo mokymas
Kalbėtojai: Ken Goldberg, William S. Floyd Jr. Gerbiamasis inžinerijos pirmininkas, UC Berkeley; Jeffas Mahleris, įkūrėjas ir CTO, „Ambi“ robotika
Apibendrinimo atotrūkis: kodėl fizinei AI reikia protingesnės duomenų kuravimo
Kalbėtojas: Benji Barash, „Roboto“ įkūrėjas ir generalinis direktorius
Žmogaus roboto bendradarbiavimo tobulinimas per natūralią kalbą AI
Kalbėtojas: Han-Pang Chiu, „Vision Technologies“, regėjimo ir robotikos laboratorijos centro techninis direktorius, SRI
5 raktai, kaip diegti AI varomus robotus gamyboje
Kalbėtojas: SK Gupta, įkūrėjas, vyriausiasis mokslininkas, „Graymatter“ robotika
AI dėl miklumo ir adaptacijos didelių akcijų aplinkoje
Kalbėtojas: Vivian Chu, „Darbo robotikos“ įkūrėjas ir vyriausiasis inovacijų pareigūnas
Deksteriniai robotai įkūnytos AI amžiuje
Kalbėtojas: Mihai Jalobeanu, „Dexman AI“ įkūrėjas ir generalinis direktorius

Tokios kompanijos kaip „NVIDIA“ kuria pagrindinius robotikos modelius ir kuria modeliavimo aplinką, tokią kaip „Omniverse“, kad mokytų robotus virtualiose aplinkose.
Bostono dinamika ir judrumo robotika kuria fizinius humanoidus ir keturkojus robotus, galinčius atlikti sudėtingus judesius ir sąveikauti su savo aplinka. „Waymo“ yra ryškus transporto sektoriaus pavyzdys, kai savarankiškai važiuojančios transporto priemonės pasikliauja fizine AI, norėdama naršyti sudėtingas kelio sąlygas ir numatyti sąveiką su kitomis transporto priemonėmis ir pėsčiaisiais.
Sandėlio automatizavime „Amazon Robotics“ naudoja fizinę AI, kad optimizuotų atsargų judėjimą ir pagerintų užsakymų vykdymą. Šie pavyzdžiai pabrėžia platų taikymą ir vis daugiau dėmesio skiria AI ištraukimui iš skaitmeninės srities ir fizinės operacijos.
Slidinėjimo smegenys yra skirtos saugiai aplink žmones, tuo pačiu yra labai pritaikomos nuo trikdžių ir žmonių sąveikos.
Iššūkis kuriant robotikos fondo modelį yra ribotas didelio masto robotikos duomenų prieinamumas, o realaus pasaulio duomenų rinkimas naudojant aparatinę įrangą gali būti lėtas ir brangus. „Skild“ AI atkreipė dėmesį į tai, pasinaudodama didelio masto modeliavimu ir žmonių vaizdo įrašais internete, kad iš anksto išmokytumėte savo pagrindų modelį. Šis metodas leidžia jiems pasiekti mastą prieš pradedant modelį su tiksliniais realaus pasaulio duomenimis, kad būtų galima pateikti klientams darbo sprendimus.
Raviraj Jain, Partner at Lightspeed, said, “Skild's foundation models are truly generalizable across form factors, already showing emergent capabilities and are extremely robust – they represent a new paradigm in embodied AI. Unlike several other robotics demos that are often overfitted for the specific demo environment, Skild robots truly work 'in-the-wild,' safely navigating and co-existing with humans.”









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}