










Figūra kuria „Helix“ modelį ir duomenų variklį, kad humanoidinių robotų parkas galėtų išmokti logistikos užduotis. Šaltinis: AI paveikslas
„AI Inc.“ pav. Šią savaitę pristatė realaus pasaulio programą savo humanoidiniams robotams ir spiralės modeliui: manipuliavimui pakuotėmis logistikai.
„Ši užduotis reikalauja žmogaus lygio greičio, tikslumo ir pritaikomumo, peržengiančios„ Pixels-to-Deaks “ribas išmoktą manipuliaciją“,-teigė Kalifornijos bendrovė „Sunnyvale“.
Šios programos esmė yra „Helix“, figūros viduje suprojektuotas vizijos kalbos (VLA) modelis. Paskelbta tik praėjusią savaitę, šis modelis suvienija suvokimą, kalbos supratimą ir išmoktą kontrolę.
Humanoidas adresuoja logistikos naudojimo atvejį
Ši užduotis kelia keletą pagrindinių iššūkių, pažymėta AI paveiksle. Pakuotės yra įvairių dydžių, formų, svorio ir tvirtumo – nuo standžių dėžučių iki deformuojamų maišų, todėl juos sunku atkartoti modeliuojant.
Paveikslas 02 humanoidinis robotas turi nustatyti optimalų momentą ir metodą, kaip sugriebti judantį objektą ir perorientuoti kiekvieną paketą, kad būtų galima atskleisti etiketę. Be to, reikia sekti daugelio pakuočių dinaminį srautą nuolat judančiame konvejerie ir išlaikyti didelį pralaidumą.
Kadangi aplinka niekada negali būti visiškai nuspėjama, sistema turi sugebėti savarankiškai taisyti. Šių iššūkių sprendimas nėra tik pagrindinis Figūrų verslo taikymas; Tai taip pat davė naujų naujų „Helix System 1“ patobulinimų, kuriems dabar naudingi visi kiti naudojimo atvejai, sakė bendrovė.
https://www.youtube.com/watch?v=f6chfc8euuo
Pagerėja „Helix“ vaizdinis vaizdas
AI paveikslas teigė, kad jos sistema dabar turi turtingą 3D aplinkos supratimą, įgalinančią tikslesnį giluminį judesį. Nors ankstesnė 1 sistema rėmėsi monokuliniu vaizdiniu įvestimi, naujoji sistema 1 naudoja stereofoninį matymo stuburą, kartu su daugialypiu funkcijų ištraukimo tinklu, kad užfiksuotų turtingas erdvinės hierarchijas.
Užuot teikę vaizdo įrašų funkcijų žetonus iš kiekvienos fotoaparato savarankiškai, abiejų fotoaparatų funkcijos yra sujungtos daugialypiame stereofoniniame tinkle prieš tai, kai jos yra žetoninės, paaiškino įmonė. Tai palaiko bendrą vaizdinių žetonų skaičių, kad būtų pastovus kryžminio masto transformatoriaus, ir išvengiama skaičiavimo pridėtinė vertė.
Daugialypės savybės leidžia sistemai interpretuoti puikias detales ir platesnius kontekstinius užuominas, kurios kartu prisideda prie patikimesnės „Vision“ kontrolės, teigė Fig.

Užsiregistruokite šiandien, kad sutaupytumėte 40% konferencijų leidimų!
Ruoštis diegimui mastu
Norint diegti vieną daugelio robotų politiką, reikia atkreipti dėmesį į paskirstymo poslinkius stebėjimo ir veiksmų erdvėse dėl mažų individualių robotų aparatinės įrangos variantų. Tai apima jutiklių kalibravimo skirtumus (turinčius įtakos įvesties stebėjimams) ir jungtinės reakcijos charakteristikoms (įtakos veiksmams vykdyti), kurie gali paveikti politikos veikimą, jei netinkamai kompensuojama,-sakė AI paveikslas.
Ypač turint didelio matmens, viso viršutinio kūno veikimo erdvę, tradicinis rankinis robotų kalibravimas nėra didesnis už robotų parką. Vietoj to, figūra moko vizualinį propriocepcijos modelį, kad būtų galima įvertinti 6D galinių efektorių pozas iš kiekvieno roboto, esančio borto vizualiniame įvestyje.
Šis internetinis „savęs kalibravimas“ leidžia stipriai perduoti politiką su minimaliomis prastovomis, sakė bendrovė.
Naudodamas išmoktą kalibravimo ir vizualinio propriocepcijos modulį, figūra galėjo pritaikyti tą pačią politiką, iš pradžių išmokytą vieno roboto duomenims, keliems papildomiems robotams. Nepaisant jutiklių kalibravimo ir mažų aparatūros skirtumų skirtumų, sistema išlaikė panašų manipuliavimo našumo lygį visose platformose.
Pav. Pareiškė, kad šis nuoseklumas parodė išmokto kalibravimo veiksmingumą mažinant kovariacinius poslinkius, veiksmingai sumažinant varginančio vienos roboto pakartotinio kalibravimo poreikį ir tampa praktiškesnis didelio masto diegimui.
Duomenų kuracija ir manipuliavimas pagreitinimu
 1). “ plotis = ”1024 ″ aukštis =” 534 ″>
1). “ plotis = ”1024 ″ aukštis =” 534 ″>Duomenų pusėje pav. Pareiškė, kad labai rūpinosi filtruojant žmonių demonstracijas, išskyrus lėtesnes, praleistus ar nesėkmingus. Tačiau ji sąmoningai palaikė demonstracijas, kurios natūraliai įtraukė taisomąjį elgesį, kai nesėkmė, paskatinusi pataisą, buvo laikoma dėl aplinkos stochastiškumo, o ne operatoriaus klaidų.
Glaudžiai bendradarbiaudami su teleoperatoriais, kad patobulintumėte ir uniformuotumėte manipuliavimo strategijas, taip pat buvo žymiai patobulinti, pranešė bendrovė.
Be vienodos manipuliavimo strategijų, figūra taip pat stengėsi, kad galų gale peržengčiau manipuliavimo žmonėmis greičiu.
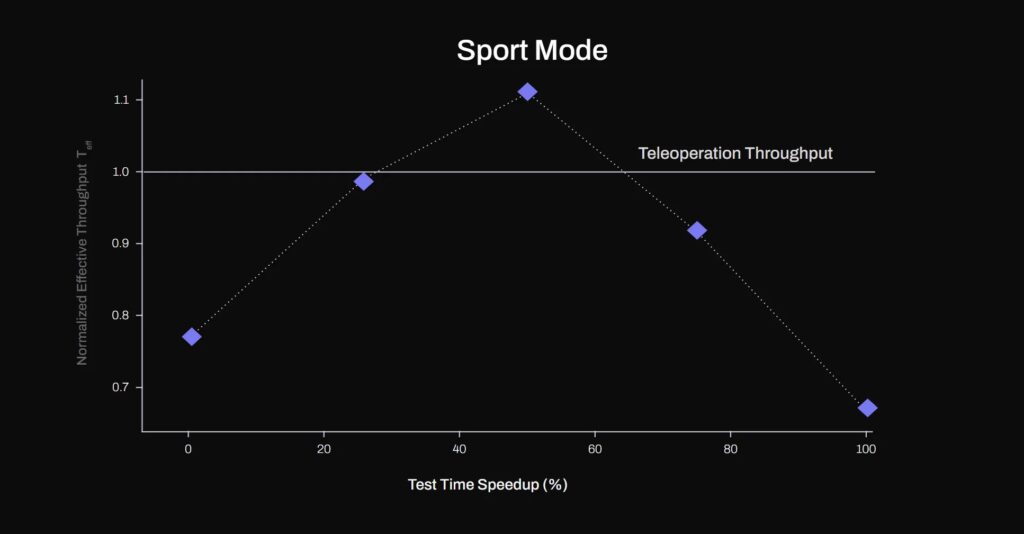
Tai pritaikė paprastą bandymo laiko techniką, kuri davė greitesnį nei demonstratoriaus išmoktą elgesį. Figūra interpoliavo politikos veiksmo gabaliuko išvestį, vadinamą „sporto režimu“. Jos 1 sistemos politika išvesti veiksmą „gabaliukai“, atspindintys 200Hz robotų veiksmų seriją.
Pavyzdžiui, bendrovė teigė, kad ji gali pasiekti 20% bandymo laiko greitį, be jokių treniruočių procedūros pakeitimų, tiesiškai pakartotinai imant veiksmo riekę (T x veiksmo_dim)-pateikdama T-Millisekundės trajektoriją iki trumpesnio (0,8 * t x veiksmo_dim) trajektorijos, tada vykdyti „Shorter“ dotaciją 200 hz.
Greitėjant politikos vykdymui tiesiškai pakartotinai imant arba „sporto režimą“, buvo veiksminga iki 50% greičio, pranešė bendrovė. Tikėtina, kad tai padaro įmanoma dėl didelės veiksmo rezultatų vertybinių popierių raiškos (200Hz).
Tačiau, kai padidėja 50% greičio, efektyvusis pralaidumas pradėjo smarkiai mažėti, nes judesiai tampa per daug netikslūs, o sistemą reikėjo dažnai atstatyti, pranešta, kad paveikslas. Bendrovė nustatė, kad padidėjus 50% greičiui, politika pasiekė greitesnį objektų tvarkymą, palyginti su ekspertų trajektorijomis, kuriomis ji mokoma (T_eff> 1).
AI paveikslas iki šiol dalijasi spiralės rezultatais
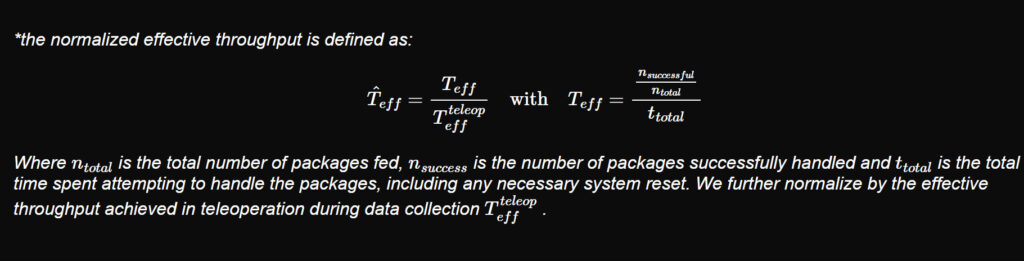
Paveikslas išmatuojo sistemos našumą, naudodamas normalizuotą efektyvųjį pralaidumą T_eff, kuris parodo, kaip greitai tvarkomi paketai, palyginti su demonstraciniais duomenimis, kuriuose jie yra apmokyti. Tai atsižvelgia į bet kurį laiką, praleistą iš naujo nustatyti sistemą, jei reikia.
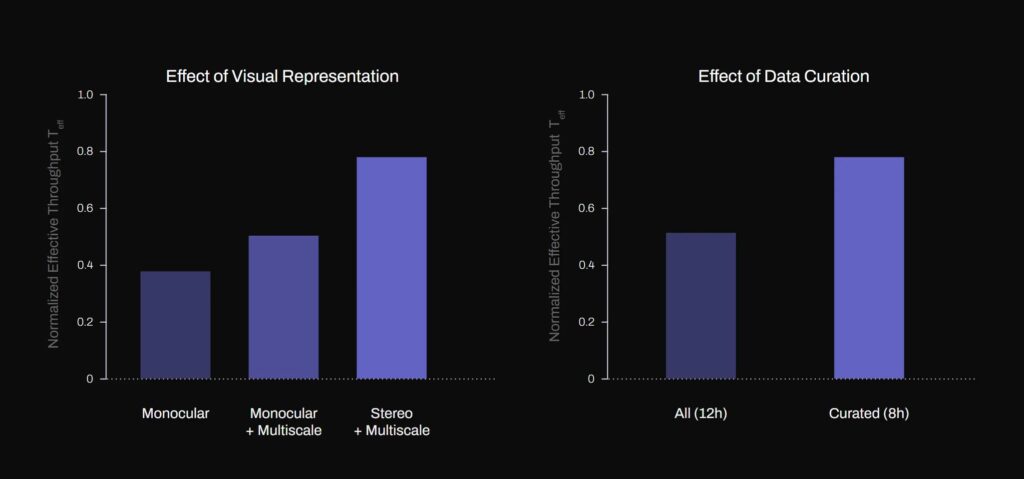
Pavyzdžiui, T_EFF> 1.1 yra 10% manipuliavimo greitis greičiau nei ekspertų trajektorija, surinkta mokymui. AI paveiksle teigiama, kad ir daugialypės funkcijos ištraukimas, ir netiesioginis stereo įvestis gali žymiai pagerinti sistemos veikimą.
Pridedant stereofoninį bendrovę, bendrovė taip pat atkreipė dėmesį į įvairaus dydžio patikimumą įvairiems pakuočių dydžiams. Stereo modelyje pralaidumas padidėja 60%, palyginti su ne stereo bazinėmis linijomis.
Be to, figūroje nustatyta, kad stereofoninis S1 gali apibendrinti plokščius vokus, į kuriuos sistema niekada nebuvo mokoma.
Bendrovė taip pat nustatė, kad vieno naudojimo atveju duomenų kokybė ir nuoseklumas turėjo daug didesnio nei duomenų kiekis. Jo rezultatai parodė, kad modelis, apmokytas su kuruojamomis, aukštos kokybės demonstracijomis, pasiekė 40% geresnį pralaidumą, nepaisant to, kad buvo mokomas trečdalio mažiau duomenų.
AI paveiksle padaryta išvada, kad ji nustatė, kaip aukštos kokybės duomenų rinkinys, derinamas su architektūriniais patobulinimais, tokiais kaip stereo daugialypis regėjimas, internetinis kalibravimas ir bandymo laiko greitis, gali pasiekti greitesnį nei demonstratoriaus vitrinų robotų manipuliaciją realiojo pasaulio logistikos triaktyvioje scenarijuje.
Jos sistema visa tai padarė, naudodama palyginti nedidelius demonstracinių duomenų kiekius, sakė įmonė. Pav. Sakė, kad „Helix“ parodo galimybes mastelio keitimui iki galo iki galo visuotinėje-motorinėje politikoje į sudėtingas pramonės programas, kai svarbus greitis ir tikslumas.
https://www.youtube.com/watch?v=z3yqhynxpws
Source link







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}