











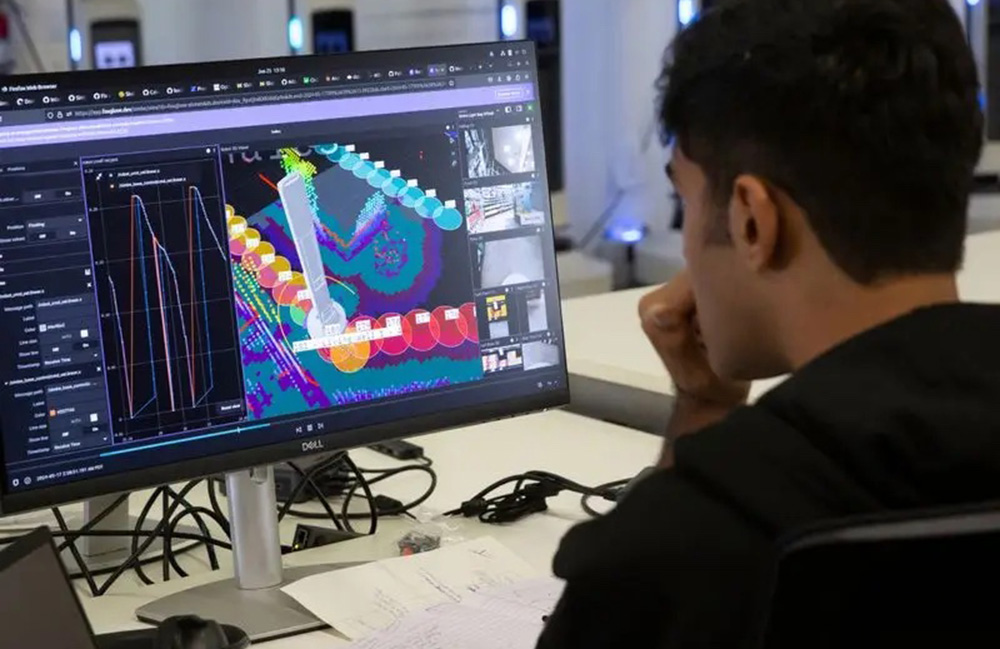
„Foxglove“ teigė, kad vartotojai gali integruoti savo platformą į kiekvieną vystymosi etapą, kad supaprastintų bendrą sudėtingumą. | Šaltinis: „Foxglove“
„Foxglove“ paskelbė naujausią savo platformos versiją. Atnaujinimai apima garso palaikymą, patobulintą 2D sekimo režimą su fotoaparatu ir kitus bendrus našumo patobulinimus.
San Franciskas, Kalifornijoje įsikūrusios įmonės platforma leidžia robotikos komandoms vizualiai derintis robotus. Šie naujausi atnaujinimai remiasi „Foxglove 2.0“, kuris buvo išleistas praėjusiais metais ir siūlo lankstų kainų planą, skirtą geriau aptarnauti visą robotikos bendruomenę.
„Foxglove“ prasidėjo kaip „WebViz“, naršyklės pagrįsto vizualizacijos įrankio, sukurto „Robotaxi Company Cruise“, filialas. Bendrovė 2019 m. „Foxglove“ įkūrėjai Adrianą MacNeilą ir Romaną Shtylmaną „Foxglove“ įkūrėjai pastebėjo „Foxglove“ įkūrėjuose „Cruise“, kiek robotikoje egzistavo nedaug įrankių, ir „Foxglove“ pradėjo 2021 m.
Daugeliui robotikos kompanijų visi įrankiai turi būti gaminami namuose, o tai gali būti brangu ir daug laiko. Bendrovė buvo įkurta užpildyti šią spragą ir sukurti robotikos kūrimo priemones, kurios galėtų padėti pagreitinti robotikos plėtrą.
Naujos „Foxglove“ funkcijos
Naujausias „Foxglove“ atnaujinimas apima tris naujas pagrindines funkcijas. Pirmasis yra garso palaikymas, kurį įmonė pridėjo per naują garso skydelį ir „Rawaudio“ pranešimų schemą. Vartotojai gali naudoti šį garso skydelį, kad padidintų ir apjuostų garso bangos formą. Taip pat galite spustelėti, kad peršoktumėte į dominančias sritis.
„Tai sugrąžina prisiminimus apie„ Winamp “vizualizacijas“, – sakė MacNeil socialiniuose pranešimuose, skelbiančiuose naują garso palaikymą. „Vis dėlto mes ne tik sukūrėme jo linksmybėms … Daugelis robotų turi mikrofonų, taigi robotikos stebėjimas reiškia, kad mums reikia garso atkūrimo!“
Tada jis pristatė patobulintą 2D sekimo režimą. Bendrovė teigė, kad 2D kamera dabar yra išdėstyta fiksuoto rėmo, o ne ekrano rėmo, kai laikykitės pozicijos režimo, atsižvelgiant į intuityvesnį fotoaparato elgseną.
Anksčiau 2D vaizdas iš viršaus į apačią riedėtų ir pakeistų objekto rėmą, kurio sekamas sekimo režimu. Dabar fiksuoto rėmo Z plokštumos tinklelis 2D skydelyje išlieka plokščias, o ne riedėjimas ir poslinkis, kai jis seka.
Galiausiai atnaujinimai apima galimybę valdyti tinklelio pranešimų pateikimo tvarką. „3D“ skydelyje dabar yra nubrėžtas „Foxglove“ tinklelio pranešimų nustatymas. Įjunkite atsiribojimą, kad tinklas pateiktų visas kitas „nubraukimo“ temas prieš likusią sceną, nepaisydami tinklo gylio. Nustatydamas tinklą, paprastai bus įjungtas gylio bandymas.
„Foxglove“ apima kitus patobulinimus ir pataisas
Be naujų funkcijų, „Foxglove“ paskelbė apie daugybę mažesnių pataisų platformoje. Bendrovė teigė, kad ji padarė bendrą programų stabilumo patobulinimą, pagerino šveitimo našumą ir pagerino automatinių X vertės diapazonų stabilumą indeksų pagrindu sukurtuose sklypuose su keliomis serijomis. Pataisymai apima:
- Fiksuotos atkūrimo problemos atidarant kelis MCAP failus vienu metu
- Ištaisyta problema, kai išdėstymo tvarkymo puslapis neleido pasirinkti išdėstymo ieškant išdėstymo pavadinimo
- Ištaisyta problema, dėl kurios šviežiai suskaidytos indikatoriaus plokštės nepavyksta inicijuoti į dešinę būseną, kol bus gauti nauji pranešimai
- Ištaisyta tam tikri iš anksto įkeltos žinutės, neįsivaizduojamos, kai yra keli leidėjai ta pačia tema
- Fiksuotas potencialas avarija, kai eksportuojami sklypai su daug taškų į CSV
- Ištaisyta trukmės formatavimo klaida „Timeline“ puslapyje
- Fiksuotas santykinis urdf/tinklelis apima netinkamai išspręstą
- Ištaisyta problema, kai „Foxglove.Grid“ artimiausio kaimyno nustatymas netinkamai indekso duomenimis, rodydamas neteisingą dažymą
- Fiksuotas foxglove.grid vertė min ir vertė MAX automatinis nustatymas, kad būtų galima teisingai nustatyti duomenų reikšmes iš duomenų
- Ištaisyta problema, rodanti teisingą laiko lango nustatymą senesniais išdėstymais
- Fiksuotos pratęsimo plokštės neveikia, kai perjungiami iš vietinių ir ORG plėtinių









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}