












„Inbolt“ perkelia regėjimą į roboto ranką ir naudoja patentuotą dirbtinį intelektą, kad pateiktų nurodymus realiuoju laiku. Kreditas: Adrien Boscher, Inbolt
Kad robotai būtų naudingi nestruktūrizuotoje aplinkoje, jiems reikia greito suvokimo ir lankstaus intelekto. „Inbolt“ įrodė savo regėjimo valdymo technologiją ir pristatė naujos kartos šiukšlių surinkimo sistemą, kuri, anot jos, suteikia „panašų į žmogų prisitaikymą prie pramoninės robotikos“.
Naujoji sistema leidžia robotams tiksliai identifikuoti, suvokti ir sudėti dalis, net kai objektai yra atsitiktinai išdėstyti arba iš dalies paslėpti, sakė Paryžiuje įsikūrusi įmonė, kuri neseniai prisijungė prie Prancūzijos technologijų 2030 programos.
„Tradicinės šiukšlių surinkimo sistemos yra per griežtos tikroms gamyklos sąlygoms“, – teigė Albane'as Dersy, „Inbolt“ įkūrėjas ir vyriausiasis veiklos vadovas. “Mes sukūrėme savo sprendimą, kad būtų pritaikytas realiuoju laiku, kad būtų galima matyti, suvokti ir koreguoti taip, kaip tai padarytų žmogus. Tokio lankstumo gamintojams reikia, kad jie galėtų pasiekti tikrai savarankišką gamybą.”
„Inbolt“ sujungia realaus laiko 3D vaizdą ir patentuotus modelius, kad užtikrintų tikslų dalių lokalizavimą ir roboto valdymą. Bendrovė teigė, kad jos bendras AI modelis „leidžia bet kuriam robotui valdyti bet kokį procesą, dalį ar stotį, padeda gamintojams greičiau diegti, sumažinti išlaidas ir išlaikyti gamybą“.
„Inbolt“ pakyla arti, kad galėtų paimti šiukšliadėžę
Tradicinės šiukšlių surinkimo sistemos remiasi fiksuotomis, viršutinėmis aukščiausios klasės ir ilgo nuotolio 3D kameromis, sudėtingu kalibravimu ir iš anksto apskaičiuotais griebimo taškais, pažymėjo Inboltas. Šios sistemos yra brangios, standžios ir lengvai suardomos, kai šiukšliadėžės juda, dalys neaptinkamos arba iš anksto nustatyti paėmimo taškai nepasiekiami.
„Apšvietimas taip pat gali būti problema“, – sakė Dersy Roboto ataskaita. „Bendradarbiaujame su „RealSense“, o mūsų šviesos agnostinės regėjimo gairės užtikrina didelį patikimumą, kai dalys pasirenkamos nuolat judančiose linijose, pavyzdžiui, automobilių pramonėje.
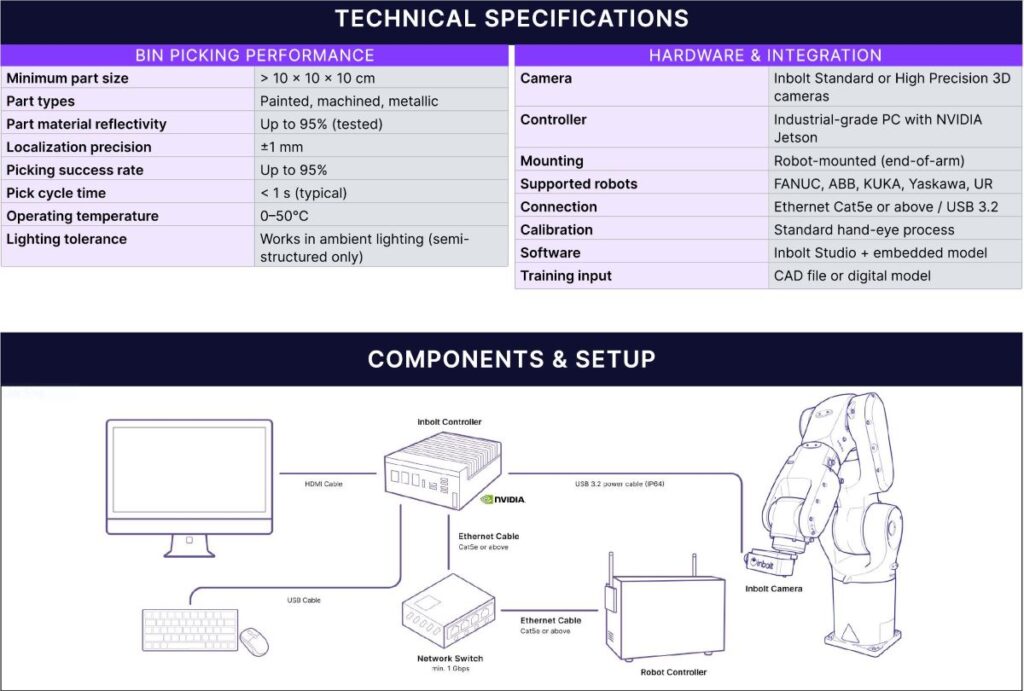
„Inbolt“ priartina jutimą prie apdorojamų objektų. Turėdama 3D kamerą, sumontuotą tiesiai ant roboto rankos, ir įmonės patentuotą AI, sistema gali nuolat suvokti, suprasti ir prisitaikyti realiuoju laiku, sakoma pranešime.
Kompanija tvirtino, kad ant rankos fotoaparato architektūra pašalina kelių fiksuotų kamerų ir brangių didelės raiškos sąrankų poreikį. Gamintojai gali naudoti tą patį robotą įvairiose dėžėse ir konfigūracijose, taip žymiai sumažindami aparatūros sąnaudas ir sąrankos laiką.

Fizinis AI nuolat koreguoja
„Inbolt“ teigė, kad jo dirbtinis intelektas teikia begalę suvokimo strategijų, todėl tobulo suvokimo nereikia. Tai suteikia greitesnį ir pigesnį sprendimą, kuris užtrunka mažiau nei 1 sekundę vienam paėmimui, o gyvos gamybos sėkmės rodiklis yra iki 95 %.
„Naudodami VLA (vizijos-kalbos-veiksmo modelius), kiekvieną kartą išradinėjate supratimą iš naujo“, – pastebėjo Dersy. “Turėdami geresnius duomenis, turime daugiau lankstumo. Mūsų sistema neranda vietos šiukšliadėžėje, ji randa lygų paviršių.”
„Inbolt“ teigė, kad jo naujoji šiukšlių surinkimo sistema atitinka procesą, įkvėptą žmogaus elgesio. Pirmiausia ji identifikuoja pasirenkamas objekto puses. Kai objektas yra sučiuptas, robotas jį analizuoja ir nustato jo vietą.
Bendrovės dirbtinis intelektas nuolat tobulina roboto trajektoriją, kad būtų galima tiksliai išdėstyti vietą, naudodamiesi galimybe, vadinama „lokalizacija rankoje“. Inboltas teigė, kad šis uždaro ciklo procesas leidžia robotui akimirksniu prisitaikyti prie dalių kintamumo.
Sistema veikia naudojant NVIDIA aparatinę įrangą ir naudoja „Inbolt“ patentuotus AI roboto valdymo modelius, kurie įgalina padėties įvertinimą realiuoju laiku ir nuolatinį trajektorijos koregavimą. „Ši unikali architektūra sumažina skaičiavimo apkrovą, tuo pačiu padidindama tvirtumą, užtikrindama nuoseklų veikimą įvairiais naudojimo atvejais ir dalių geometrija“, – sakė Inboltas.
“Su naujausiais GPU esame atsparūs ateičiai. Net nenaudojome jų maždaug prieš mėnesį; naudojome standartinius kompiuterius”, – sakė Dersy.
„Inbolt“ sukūrė savo šiukšlių surinkimo sistemą, kad galėtų dirbti su keliais robotais. Šaltinis: Inbolt
Robotų ginklus galima greitai išmokyti naudojant CAD modelius
Pozos nustatymo technologija gali būti apmokyta CAD modeliuose per kelias minutes ir yra suderinama su FANUC, ABB, KUKA, Yaskawa ir Universal Robots robotais. Jis taip pat veikia su bet kokio dydžio ar padėties šiukšliadėžėmis, net jei jos juda veikimo metu. „Inbolt“ teigė, kad dėl to jos pasiūlymas yra unikalus rinkoje.
Įkurta 2019 m., „Inbolt“ laimėjo 2023 m. RBR50 inovacijų apdovanojimą už tai, kad pristatė „GuideNow“ – autonominę 3D viziją aptarnaujančią ir realaus laiko regėjimo valdymo sistemą. 2024 m. bendrovė surinko 17 milijonų dolerių iš A serijos finansavimo ir turi biurą JAV Newlab inovacijų centre Detroite.
„Inbolt“ įdiegia patikrintas technologijas įvairiose patalpose
„Gamyklos yra pusiau struktūrinė aplinka, o mūsų ankstyvieji vartotojai yra didžiausi pasaulio gamintojai“, – sakė Albane'as. „Jie gali modifikuoti kėbulų cechų linijas naudodami mūsų sukurtą dalių išdėstymą.
Su klientais, įskaitant „Stellantis“, „Toyota“, „Beko“ ir „Volkswagen“, „Inbolt“ teigė, kad aptarnauja daugiau nei 70 gamyklų visame pasaulyje. Jo robotai per pirmąjį 2025 m. pusmetį nuveikė 20 milijonų ciklų ir parodė šešių mėnesių investicijų grąžą (IG).
„Inbolt“ naujoji nestruktūrinė šiukšlių surinkimo sistema jau veikia daugiau nei penkiose gamyklose. Bendrovė teigė, kad jos technologija nuolat užtikrina aukštą veikimo laiką ir pralaidumą, įrodydama jos tvirtumą realiomis pramonės sąlygomis.
Gamintojai, norintys modernizuoti šiukšlių surinkimo stotis, gali paprašyti „Inbolt“ tiesioginės demonstracinės versijos arba bandomojo diegimo.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}