










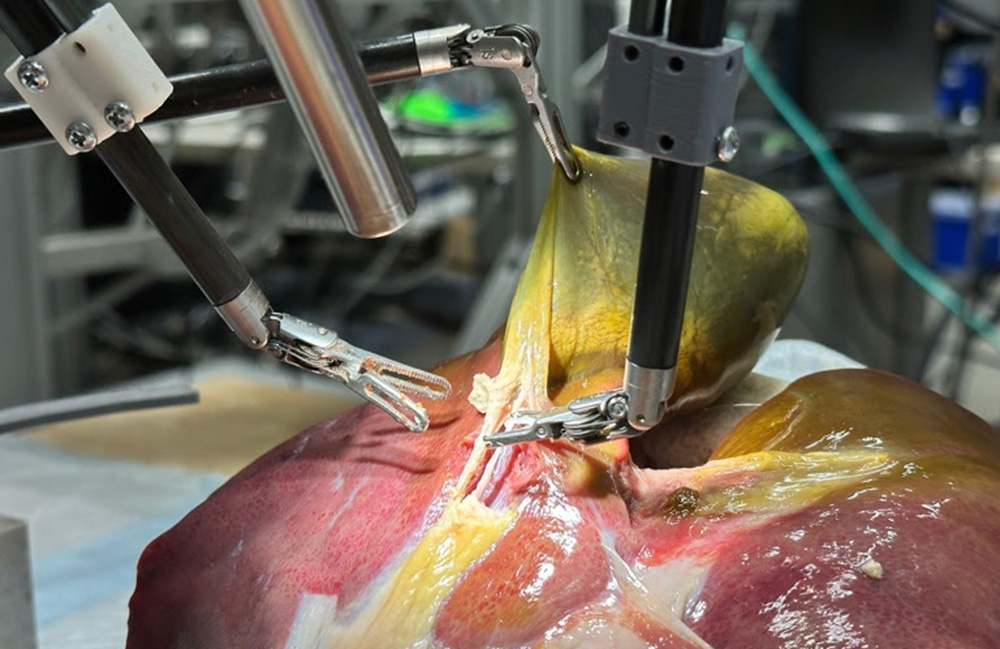
Chirurginio roboto transformatoriaus-hierarchija, atliekanti tulžies pūslės operaciją. | Šaltinis: Juno-Tung Chen, Johns Hopkins universitetas
Johns Hopkins universitetas šiandien paskelbė, kad robotas, apmokytas dėl operacijų vaizdo įrašų, atliko ilgą tulžies pūslės pašalinimo be žmogaus pagalbos etapą. Robotas pirmą kartą veikė gyvam pacientui. Operacijos metu ji reagavo į komandos komandas ir išmoko iš komandos, pavyzdžiui, pradedantysis chirurgas, dirbantis su mentoriumi.
Robotas atliko kvalifikuoto žmogaus chirurgo kompetenciją visais bandymais, net ir netikėtų scenarijų, būdingų realaus gyvenimo medicininėms situacijoms, teigimu, teigia tyrėjai. Federaliniu mastu finansuojami darbai žymi chirurginės robotikos pažangą, kai robotai gali atlikti tiek mechaniniu tikslumu, tiek su žmogaus pritaikomumu ir supratimu, sakė Johns Hopkins.
„Šis pažanga perkelia mus nuo robotų, kurie gali atlikti specifines chirurgines užduotis robotams, kurie iš tikrųjų supranta chirurgines procedūras“, – teigė medicinos robotizatorius Axel Krieger. „Tai yra kritinis skirtumas, kuris mus žymiai priartina prie kliniškai perspektyvių autonominių chirurginių sistemų, kurios gali veikti nepatogioje, nenuspėjamoje tikrosios paciento priežiūros tikrovėje“.
Johns Hopkins sistema realiu laiku prisitaiko prie anatomijos
2022 m. „Krieger“ išmanusis audinio autonominis robotas „Star“ atliko savo pirmąją autonominę robotų operaciją gyvam gyvūnui – laparoskopinei operacijai kiaulei. Tačiau tam robotui reikėjo specialiai pažymėto audinio, veikiančio labai kontroliuojamoje aplinkoje, ir laikėsi griežto, iš anksto nustatyto chirurginio plano. Kriegeris teigė, kad tai buvo tarsi roboto mokymas važiuoti kruopščiai suplanuotu maršrutu.
Tačiau jis sakė, kad naujoji sistema „yra tarsi roboto mokymas, kad būtų galima važiuoti bet kokiu keliu bet kokiomis sąlygomis, protingai reaguodama į tai, ką ji susiduria“.
Jis sakė, kad chirurginis robotų transformatoriaus-hierarchija, SRT-H, tikrai atlieka operaciją. Tai gali prisitaikyti prie individualių anatominių bruožų realiuoju laiku, priimti sprendimus dėl skrydžio ir savarankiškai taisyti, kai viskas vyksta ne taip, kaip tikėtasi.
Sukurtas su ta pačia mašininio mokymosi architektūra, kuri maitina „ChatGpt“, SRT-H taip pat yra interaktyvus, galintis reaguoti į šnekamąsias komandas (tokias kaip „Grab the Tull Plostder Head“) ir pataisas („šiek tiek perkelkite kairę ranką į kairę“). Robotas iš šių atsiliepimų sužino.
„Šis darbas yra didelis šuolis iš ankstesnių pastangų, nes jame nagrinėjamos kai kurios pagrindinės kliūtys diegti autonominius chirurginius robotus realiame pasaulyje“, – sakė pagrindinis autorius Ji Woong „Brian“ Kim, buvęs podoktorantūros tyrinėtojas Johns Hopkins, kuris dabar yra Stanfordo universitete. „Mūsų darbas rodo, kad AI modeliai gali būti pakankamai patikimi chirurginei savarankiškumui-tai, kas kadaise jautėsi toli, bet dabar yra akivaizdžiai perspektyvus“.
SRT-H remiasi pagrindinėmis chirurgijos užduotimis
Praėjusiais metais „Krieger“ komanda panaudojo sistemą robotui išmokyti atlikti tris pagrindines chirurgines užduotis: manipuliuoti adata, kėlimo kūno audinys ir siūbavimas. Tos užduotys užtruko tik po kelių sekundžių. Johnsas Hopkinsas už pasiekimą laimėjo 2025 RBR50 robotikos inovacijų apdovanojimą.
Tulžies pūslės pašalinimo procedūra yra daug sudėtingesnė, minučių trukmės 17 užduočių eilutė. Robotas turėjo atpažinti tam tikrus kanalus ir arterijas ir tiksliai juos patraukti, strategiškai išdėstyti spaustukus ir nukirpti dalis žirklėmis.
SRT-H išmoko atlikti „Tulm Plamper“ darbą žiūrėdamas universiteto chirurgų vaizdo įrašus, kurie tai daro ant kiaulių kardelių. Komanda sustiprino vaizdinius mokymus antraštėmis, apibūdinančiomis užduotis.
Peržiūrėjęs vaizdo įrašus, robotas atliko operaciją 100% tikslumu, teigia Johns Hopkins. Nors robotas darbui atlikti užtruko ilgiau nei žmogaus chirurgas, rezultatai buvo palyginami su eksperto chirurgo.
„Kaip chirurgijos gyventojai dažnai įvaldo skirtingas operacijos dalis skirtingais tempais, šis darbas iliustruoja pažadą sukurti autonomines robotų sistemas panašiai moduliniu ir progresyviu būdu“,-sakė Jeffas Joplingas, bendraautorius ir Johns Hopkins chirurgas.
Robotas atliko anatomines sąlygas, kurios nebuvo vienodos, ir netikėtų apvažiavimų metu. Įskaitant tada, kai tyrėjai pakeitė sistemos pradinę padėtį ir kai jie pridėjo į kraują panašius dažus, kurie pakeitė tulžies pūslės ir aplinkinių audinių išvaizdą.
„Man tai tikrai rodo, kad galima autonomiškai atlikti sudėtingas chirurgines procedūras“, – teigė Kriegeris. „Tai yra koncepcijos įrodymas, kad tai įmanoma, ir ši mėgdžiojimo mokymosi sistema gali automatizuoti tokią sudėtingą procedūrą tokiu dideliu patikimumo laipsniu“.
Komanda teigė, kad ji norėtų išmokyti ir išbandyti sistemą apie daugiau operacijų rūšių ir išplėsti jos galimybes atlikti išsamią autonominę operaciją.
https://www.youtube.com/watch?v=pykuvygd-0o








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}