










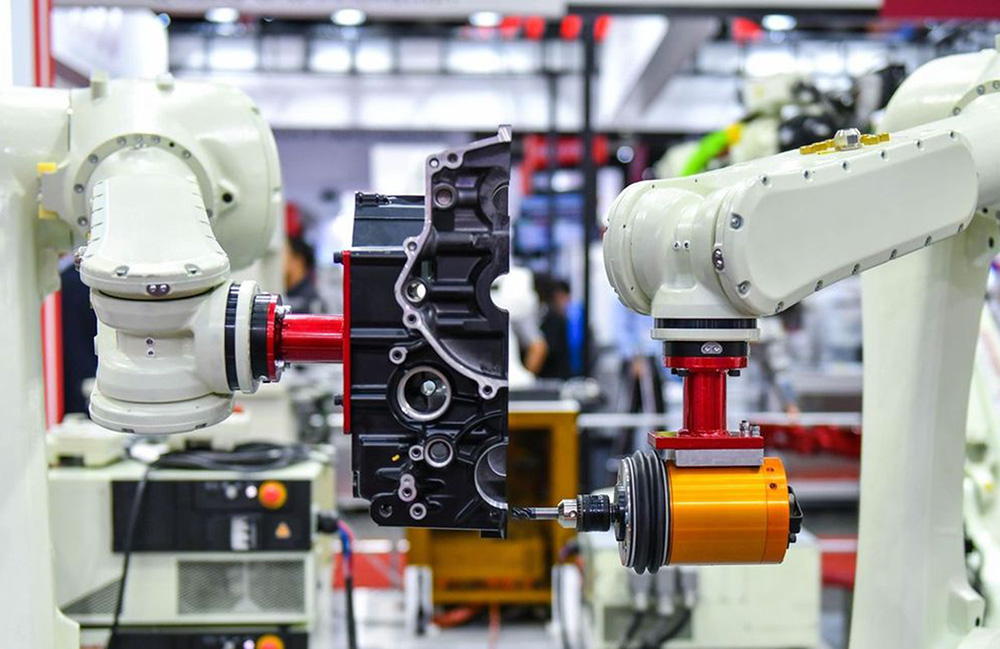
„Machine Vision“ suteikia sistemoms aukšto lygio supratimą apie aplinkos apsaugos nustatymus iš vaizdų. | Šaltinis: Digikey
„Machine Vision“ yra technologijų kolekcija, suteikianti automatizuotą įrangą aukšto lygio supratimą apie artimiausią aplinką iš vaizdų. Be „Machine Vision“ programinės įrangos, skaitmeniniai vaizdai būtų ne kas kita, kaip paprastos, nesusijusios „Pixel“ kolekcijos.
Mašinos matymas leidžia kompiuteriams aptikti kraštus ir formas vaizduose, leidžiant aukštesnio lygio apdorojimo procedūras nustatyti iš anksto nustatytus dominančius objektus. Vaizdai šia prasme nebūtinai apsiriboja fotografiniais vaizdais matomame spektre; Jie taip pat gali apimti vaizdus, gautus naudojant infraraudonųjų spindulių, lazerio, rentgeno ir ultragarsinius signalus.
Šiandien viena įprasta mašinos matymo pritaikymas pramoninėje aplinkoje yra nustatyti konkrečią šiukšliadėžės dalyje, kurioje yra atsitiktinai išdėstytas dalių derinys. Čia „Machine Vision“ gali padėti pasirinkti robotus automatiškai pasiimti tinkamą dalį.
Žinoma, tokių dalių atpažinimas su vaizdavimo grįžtamuoju ryšiu būtų gana nesudėtinga, jei jos visos būtų tvarkingai išdėstytos ir orientuotos į dėklą. Tačiau tvirti „Machine Vision“ algoritmai gali atpažinti objektus skirtingais atstumais nuo fotoaparato ir skirtingomis orientacijomis.
Pats moderniausios mašinų matymo sistemos įgalino naujus ir kylančius dizainus kur kas sudėtingesnius nei šiukšliadėžės rinkimas.
Mašinos matymo technologijos

3D skaitytuvai užfiksuoja 2D objekto vaizdus, kad būtų sukurtas 3D jo modelis. Kai kuriais atvejais skaitmeniniai modeliai naudojami 3D spausdinimo kopijoms. | Šaltinis: Digikey
Terminas Mašinos matymas Kartais rezervuojama remtis labiau nusistovėjusiais ir efektyviais matematiniais informacijos išgavimo iš vaizdų metodais.
Priešingai, terminas Kompiuterio matymas Paprastai apibūdina modernesnes ir skaičiavimus reikalaujančias sistemas-įskaitant juodosios dėžės metodus, naudojant mašinų mokymąsi ar dirbtinį intelektą (AI).
Tačiau mašinos matymas taip pat gali būti naudojamas kaip visiškas terminas, apimantis visus aukšto lygio informacijos ištraukimo iš vaizdų metodus.
Vis labiau paplitusios aukšto lygio reikšmės iš vaizdų technologijos. Tyrimų bendruomenėje tokios technologijos dažnai laikomos skirtingomis nei mašinų matymu. Tačiau praktine prasme visi yra skirtingi būdai, kaip pasiekti mašinos matymą, ir daugeliu atvejų sutampa.
Skaitmeninio vaizdo apdorojimas yra skaitmeninio signalo apdorojimo forma, apimanti vaizdo gerinimą, restauravimą, kodavimą ir suspaudimą. Privalumai, palyginti su analoginiu vaizdo apdorojimu, apima minimalų triukšmą ir iškraipymus, taip pat daug daugiau algoritmų.
Skaitmeninis vaizdų patobulinimas dažnai apima didėjantį kontrastą, taip pat gali atlikti geometrinius pataisymus kampo ir objektyvo iškraipymų peržiūrai. Suspaudimas paprastai pasiekiamas suderinus sudėtingą signalą į kosinuso funkcijų derinį.
Fotogrammetrija naudojamas tam tikras funkcijų identifikavimas, kad būtų galima išgauti matavimus iš vaizdų. Šie matavimai gali apimti 3D informaciją, kai iš skirtingų pozicijų buvo gauti keli tos pačios scenos vaizdai.
Paprasčiausios fotogrammetrijos sistemos išmatuoja atstumą tarp dviejų vaizdo taškų, naudojant skalę. Paprastai šiam tikslui į vaizdą reikia įtraukti žinomą mastelio nuorodą.
Funkcijų aptikimas Leidžiame kompiuteriams nustatyti kraštus ir kampus arba vaizdo taškus. Tai yra būtinas pirmasis fotogrammetrijos žingsnis, taip pat objektų ir judesio identifikavimas. BLOB aptikimas gali nustatyti regionus, kurių kraštai yra per sklandūs kraštų ar kampų aptikimui.
Modelio atpažinimas naudojamas konkretiems objektams identifikuoti. Paprasčiausia tai gali reikšti konkrečios, tiksliai apibrėžtos mechaninės konvejerio dalies ieškojimą.
3D rekonstrukcija Nustato 3D objektų formą iš 2D vaizdų. Tai galima pasiekti naudojant fotogrammetrinius metodus, kuriuose bendrų bruožų aukštis (identifikuotas vaizduose iš skirtingų stebėjimo taškų) nustatomas trikampiu. 3D rekonstrukcija taip pat įmanoma naudojant vieną 2D vaizdą.

Kaip užsakomos mašinos matymo užduotys
Daugelis mašinų matymo sistemų palaipsniui derina aukščiau pateiktus metodus, pradedant nuo žemo lygio operacijų, o po to-po vieną iki aukštesnio lygio operacijų. Žemiausiu lygiu visi vaizdo taškai yra laikomi kaip aukšto lygio duomenys. Tada kiekviena sekos operacija identifikuoja vaizdo ypatybes ir parodo dominančią informaciją su palyginti nedideliu duomenų kiekiu.
Pirmiausia ateina žemo lygio vaizdo patobulinimo ir restauravimo operacijos, o po to-funkcijų aptikimas. Jei naudojami keli jutikliai, žemo lygio operacijos gali būti vykdomos paskirstytais procesais, skirtais atskiriems jutikliams. Kai aptiktos atskirų vaizdų ypatybės, gali atlikti aukštesnio lygio fotogrammetrinius matavimus, kaip ir bet kuris objekto identifikavimas ar kitos užduotys, remiantis kombinuotais keliais vaizdais ir jutikliais.
Tiesioginiai skaičiavimai ir mokymosi algoritmai
https://www.youtube.com/watch?v=uxilq1igxxg
A Tiesioginis skaičiavimas Mašinos matymo kontekste yra matematinių funkcijų rinkinys, kurį rankiniu būdu apibrėžia žmogaus programuotojas. Tai priima įvestis, tokias kaip vaizdo taškų vertės, kad gautų išėjimus, tokius kaip objekto kraštų koordinatės.
Priešingai, mokymosi algoritmai nėra tiesiogiai parašyti žmonių, o yra mokomi naudojant pavyzdinius duomenų rinkinius, siejančius įvestis su norimomis išvestimis. Funkcija, pavyzdžiui, juodosios dėžės, mašininis mokymasis dabar naudojasi giliu mokymu, pagrįstu dirbtiniais neuroniniais tinklais, kad būtų galima atlikti savo skaičiavimus.
Paprastas mašinų mokymasis pramoninėms reikmėms dažnai yra patikimesnis ir mažiau apskaičiuojamas, jei pagrįstas tiesioginiu skaičiavimu. Žinoma, yra ribų, ką galima pasiekti tiesiogiai skaičiuojant.
Pvz., Tiesioginis skaičiavimas negalėjo įvykdyti pažangaus modelio atpažinimo, reikalingo asmenims identifikuoti pagal jų veidus, ypač iš perkrautos viešosios erdvės vaizdo įrašų. Priešingai, mašininis mokymasis atvirai tvarko tokias programas. Nenuostabu, kad mašininis mokymasis vis labiau naudojamas žemesnio lygio mašinos matymo operacijoms, įskaitant vaizdo patobulinimą, restauravimą ir funkcijų aptikimą.
Mašinos pramonės saugos matymas

Vaizdo jutikliai gali atpažinti ruošinius pagal tipą, dydį, vietą, orientaciją ir dažymą. | Šaltinis: Digikey
Mašinos matymas nebėra nišinė technologija. Ši technologija patiria didžiausią diegimo augimą pramonėje. Labiausiai dramatiški vystymasis yra tai, kaip dabar mašinos matymas papildo pramoninių augalų saugos sistemas, kurios garso signalizacijos ar garso įrašus išduoda, kai augalų personalas patenka į darbo zoną be kietos skrybėlės, kaukės ar kitų teisingų apsaugos priemonių. Mašinos matymas taip pat gali užbaigti sistemas, kurios skelbia, kai mobiliosios mašinos, tokios kaip šakiniai krautuvai, tampa per arti žmonių.
Šios ir panašios mašinų matymo sistemos kartais gali pakeisti sunkų apsaugą aplink pramoninius robotus, kad būtų galima efektyviau veikti. Jie taip pat gali pakeisti arba patobulinti saugos sistemas, pagrįstas šviesos apsaugomis, kurios tiesiog sustabdo mašinas, jei augalų darbuotojas patenka į darbo ląstelę. Kai mašinos matymas stebi gamyklinius grindis, supančius „Workcell“, tokiose ląstelėse robotai gali palaipsniui sulėtėti artėjant žmonėms.
Pramoninės parametrų dizainai vystosi taip, kad tilptų robotai ir kita darbo ląstelių įranga, saugu augalų personalui judėti, net kol ta įranga veikia. Šios ir kitos sistemos, pagrįstos mašinos matymu, taps daug labiau paplitusi gamyklos procesų dalimi.
Supratę, kaip suprojektuoti ir diegti išmaniųjų mašinų matymo sistemas, inžinieriai ir gamintojai gali protingai integruoti vaizdinės žvalgybos įrankius gamyklos grindyse, padidindami saugą ir efektyvumą. Technologijai tobulėjant sparčiai, „Digikey“ ir toliau siūlo novatoriškus automatizavimo sprendimus nuo IoT iki AI ir „Machine Vision“.
Apie autorių
 Rich Miron yra vyresnysis „Digikey“ techninio turinio kūrėjas. „Digikey“ yra pripažintas pasauliniu lyderiu ir nuolatiniu novatoriumi moderniausiu elektroninių komponentų ir automatikos produktų platinimu visame pasaulyje, teikiant daugiau nei 16,5 mln. Komponentų iš daugiau nei 3000 kokybiškų prekės ženklų gamintojų.
Rich Miron yra vyresnysis „Digikey“ techninio turinio kūrėjas. „Digikey“ yra pripažintas pasauliniu lyderiu ir nuolatiniu novatoriumi moderniausiu elektroninių komponentų ir automatikos produktų platinimu visame pasaulyje, teikiant daugiau nei 16,5 mln. Komponentų iš daugiau nei 3000 kokybiškų prekės ženklų gamintojų.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}