









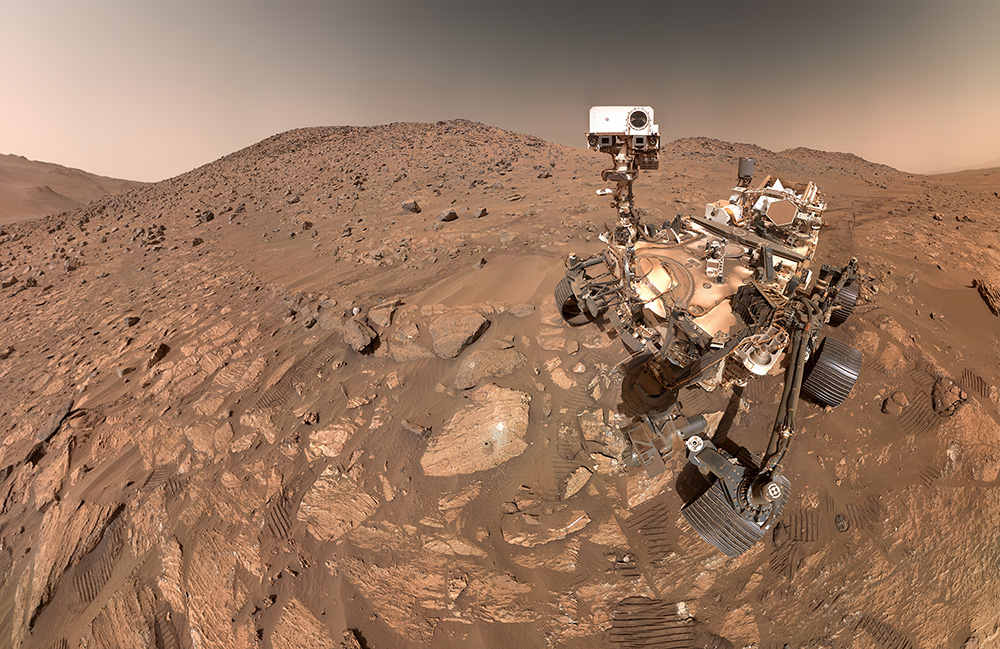
„Perseverance Rover“ fotografuoja asmenukę ant uolos, pavadintos Cheyava Falls. | Šaltinis: NASA/JPL-Caltech/MSSS
NASA marsaeigis „Perseverance“ jau beveik penkerius metus tyrinėja Marsą. Tačiau kosmoso agentūros komanda vis dar randa būdų, kaip peržengti ribas naudojant robotą. NASA neseniai paskelbė, kad „Perseverance“ baigė pirmąjį dirbtinio intelekto suplanuotą važiavimą.
Demonstracijos metu NASA inžinieriai naudojo vizijos kalbos modelius (VLM), kad sukurtų Perseverance kelio taškus. Paprastai tai yra sudėtinga sprendimų priėmimo užduotis, kurią rankiniu būdu atlieka misijos žmonių marsaeigių planuotojai. Demonstracija vyko gruodžio 8–10 d., o NASA Jet Propulsion Laboratory (JPL) Pietų Kalifornijoje vadovavo misijai.
„Šis demonstravimas parodo, kaip toli pažengė mūsų galimybės, ir išplečia, kaip tyrinėsime kitus pasaulius“, – sakė NASA administratorius Jaredas Isaacmanas. “Tokios autonominės technologijos, kaip ši, gali padėti misijoms veikti efektyviau, reaguoti į sudėtingą reljefą ir padidinti mokslo sugrįžimą didėjant atstumui nuo Žemės. Tai puikus pavyzdys, kaip komandos kruopščiai ir atsakingai taiko naujas technologijas realiose operacijose.”
VLM išanalizavo esamus duomenis iš JPL paviršiaus misijos duomenų rinkinio. AI naudojo tuos pačius vaizdus ir duomenis, kuriais remiasi žmonių planuotojai kurdami kelio taškus. Tai apima fiksuotas vietas, kuriose roveris imasi naujų instrukcijų.
Iniciatyvą vedė JPL Rover Operations Center (ROC) bendradarbiaujant su Anthropic, naudojant bendrovės Claude AI modelius.
NASA leidžia dirbtiniam intelektui rodyti kelią
Marsas yra vidutiniškai apie 140 mln. (225 mln. km) nuo Žemės. Šis atstumas sukuria didelį ryšio uždelsimą, todėl nuotolinis valdymas tampa neįmanomas.
Vietoj to, pastaruosius 28 metus žmonės „vairuotojai“ planuoja ir vykdo misijų maršrutus. Šiems vairuotojams pavesta analizuoti reljefo ir būsenos duomenis bei nubrėžti maršrutą naudojant tarpinius taškus.
Papildomas iššūkis yra tai, kad šie tarpiniai taškai turi būti išdėstyti ne didesniu kaip 330 pėdų (100 m) atstumu vienas nuo kito, kad būtų išvengta galimų pavojų. Kai planas yra parengtas, žmonės vairuotojai per NASA Deep Space tinklą siunčia jį marsaeigiui, kuris jį vykdo.
Dabar, naudodama Perseverance, NASA bando kažką kitokio. Generatyvusis AI išanalizavo NASA Mars Reconnaissance Orbiter kameros HiRISE (High Resolution Imaging Science Experiment) didelės skiriamosios gebos orbitos vaizdus ir reljefo nuolydžio duomenis iš skaitmeninių aukščio modelių.
Nustačius svarbias reljefo ypatybes – pamatines uolienas, atodangas, pavojingus riedulių laukus, smėlio raibulius ir panašius dalykus – buvo sukurtas ištisinis kelias su kelio taškais.
Siekdama užtikrinti, kad AI instrukcijos būtų visiškai suderinamos su roverio skrydžio programine įranga, inžinierių komanda taip pat apdorojo pavaros komandas per JPL skaitmeninį dvynį. Prieš NASA išsiunčiant komandas į Marsą, skaitmeninis dvynys patikrino daugiau nei 500 000 telemetrijos kintamųjų.
Gruodžio 8 d., atmintyje turėdamas generatyvius AI kelio taškus, Perseverance nuvažiavo 689 pėdas (210 m). Po dviejų dienų jis nuvažiavo 807 pėdas (246 m).
„Pagrindiniai generatyvaus dirbtinio intelekto elementai yra daug žadantys supaprastinant autonominės navigacijos ramsčius, skirtus vairavimui už planetos ribų: suvokimas (uolų ir bangelių matymas), lokalizavimas (žino, kur esame) ir planavimas bei valdymas (saugiausio kelio sprendimas ir vykdymas)“, – teigė Vandi Verma, „Pers evers“ kosmoso robotų komandos narys ir „Pers ever“ komandos narys.
„Mes artėjame prie dienos, kai generatyvūs dirbtinis intelektas ir kiti išmanieji įrankiai padės mūsų antžeminiams marsaečiams važiuoti kilometrų mastu, kartu sumažinant operatoriaus darbo krūvį ir pažymint įdomias paviršiaus ypatybes mūsų mokslo komandai, tiriant didžiulius roverių vaizdų kiekius“, – pridūrė ji.
Kas toliau už Perseverance?
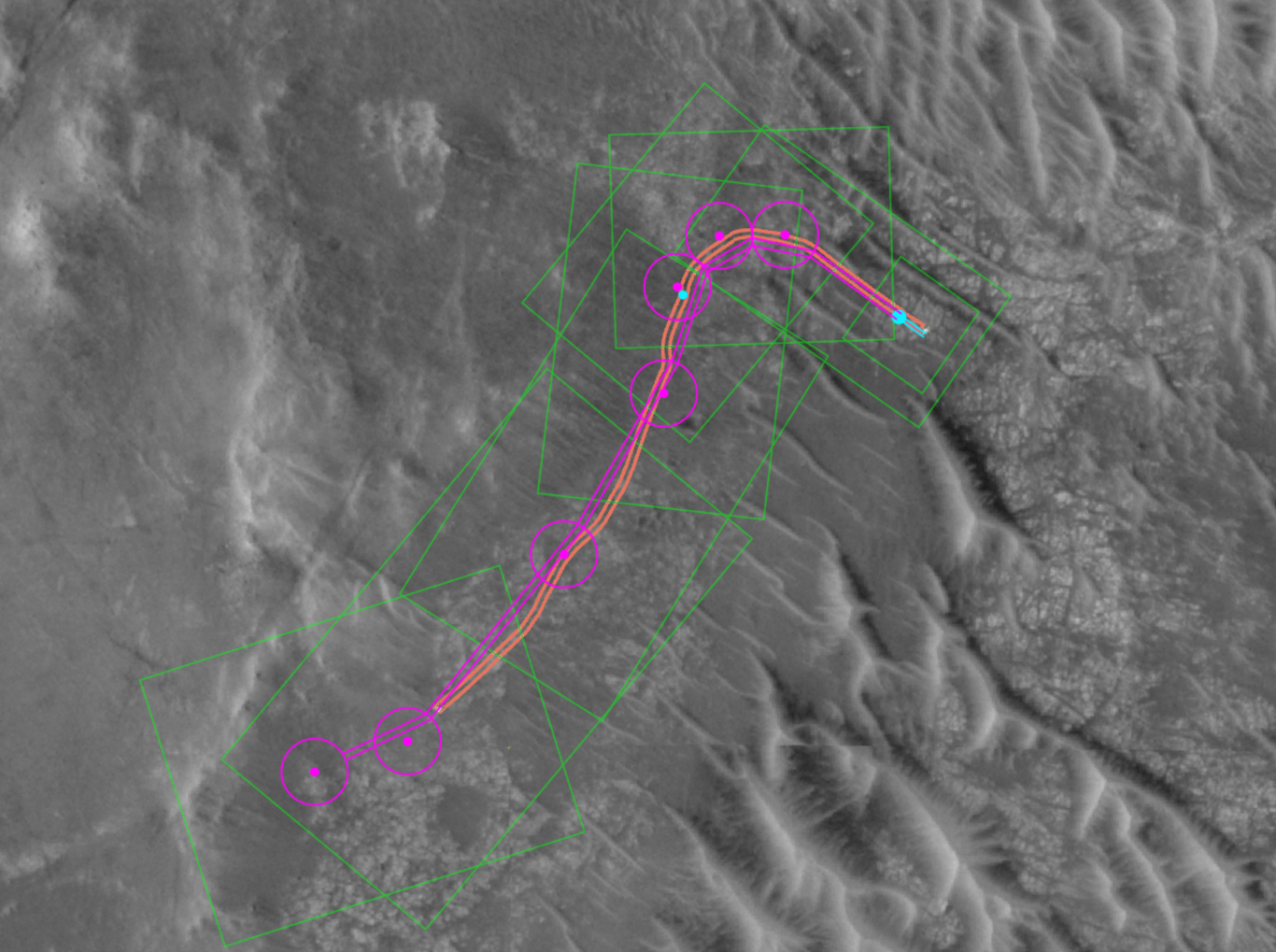
Šiame orbitiniame vaizde pavaizduoti dirbtinio intelekto suplanuoti (rausvai raudonos spalvos) ir faktiniai (oranžinės spalvos) maršrutai, kuriais Marsaeigis Perseverance nuėjo 2025 m. gruodžio 10 d., važiuodamas ties Jezero krateriu. Važiavimas buvo antrasis iš dviejų demonstracijų, įtraukiančių generatyvųjį AI planuojant roverį. | Šaltinis: NASA/JPL-Caltech
NASA teigė, kad tikisi, kad technologija, kurią ji išbandė su Perseverance, gali būti naudinga daugeliui skirtingų sričių.
„Įsivaizduokite intelektualias sistemas ne tik žemėje, bet ir mūsų marsaeigių, sraigtasparnių, dronų ir kitų paviršiaus elementų, apmokytų mūsų NASA inžinierių, mokslininkų ir astronautų bendra išmintimi, briaunose“, – sakė JPL tyrimų sistemų biuro vadovas Mattas Wallace'as. „Tai yra žaidimą keičianti technologija, kurios reikia, kad sukurtume infrastruktūrą ir sistemas, reikalingas nuolatiniam žmogaus buvimui Mėnulyje ir JAV nuvežimui į Marsą ir už jo ribų.
Nuo tada, kai nusileido Marse, „Perseverance“ stengėsi rinkti planetos uolienų pavyzdžius, kuriuos NASA tikisi galiausiai sugrąžinti į Žemę vykdydama Marso mėginio grąžinimo (MSR) kampaniją. Tačiau ši kampanija, kurią iš pradžių buvo planuota pradėti 2027 m., šiuo metu yra neaiški.
2025 m. gegužę Trumpo administracija paskelbė NASA biudžeto pasiūlymą 2026 fiskaliniams metams, kuriame planavo atšaukti MSR programą. Praėjusį mėnesį Kongresas patvirtino, kad MSR nebus finansuojamas, o tai iš esmės atšaukė misiją.
Tačiau MSR kampanija buvo bendras NASA ir Europos kosmoso agentūros (ESA) projektas. Neaišku, kaip ir ar ESA veiks be NASA.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}