











IKO sako, kad humanoidiniams robotams reikia tinkamų judesio komponentų, kad atitiktų našumo reikalavimus. Šaltinis: „Adobe“ atsargos
Tikimasi, kad humanoidiniai robotai pakeis platų veiklos spektrą, dėka pažangių neuroninių tinklų, kuriuose vadovaujami jungtys, priedai ir galiniai efektoriai, kad suteiktų praktiškai žmogaus įgūdžių. Tačiau didėjantis humanoidų pritaikymas nebūtų įmanomas be pažangių judesių komponentų, skirtų pritaikyti jų užduotis ir aplinkai.
Kai kurios augančios rinkos apima sveikatos priežiūrą, mažmeninę prekybą ir svetingumą, gamybą, medžiagų tvarkymą ir logistiką. Iš tikrųjų prognozuojama, kad „Goldman Sachs Research“ duomenimis, numatoma, kad humanoidinės rinkos potencialas iki 2035 m. Sieks iki 38 milijardų JAV dolerių.
Pažvelkime į kai kuriuos dizaino elementus, kuriuos reikia rūšiuoti, kad nurodytumėte tinkamą judesio komponentą, ir optimizuoti jį roboto numatytoms užduotims ir aplinkai.
Humanoidinės užduotys reikalauja tikslaus, kontroliuojamo judesio
Nors humanoidų mechaninėms sistemoms greičiausiai reikės optimizuotų komponentų, kad būtų galima atlikti užduotis planuojamoje aplinkoje, svarbu išsiaiškinti, ką standartiniai produktai gali padaryti jūsų judesio sistemai prieš įsipareigojant pritaikytam komponentui.
Iš ten galite perkelti savo specialius reikalavimus į judesio komponentų specialistą, turintį patikrintą patirtį, modifikuodami standartinius produktus, kad išspręstumėte programų iššūkius. Čia yra keletas įprastų humanoidinių judesių elementų kartu su kai kuriais standartiniais komponentais, kurie yra tinkami užduotims, kaip pavyzdžius naudojant IKO produktus:
- Klubo, sąnario, alkūnės ar riešo judėjimas. Humanoiduose nėra svarbesnio komponento nei sukryžiuoti ritininiai guoliai (CRB). Kai ritinėliai pakaitomis kerta stačiu kampu tarp savo vidinių ir išorinių žiedų, CRB gali tuo pačiu metu valdyti radialinę, trauką ir momentinių apkrovą. Šis išdėstymas leidžia voleliams labiau kontaktuoti su lenktynių taku, todėl alkūnių, klubų ir kitų sąnarių robotinės pavaros gali manipuliuoti didesnėmis stabilumu ir sukimosi tikslumu – visa tai yra kompaktiškas. Nenuostabu, kad tipiškas humanoidas turi nuo 14 iki 20 CRB, kad galėtų atlikti įvairias funkcijas.
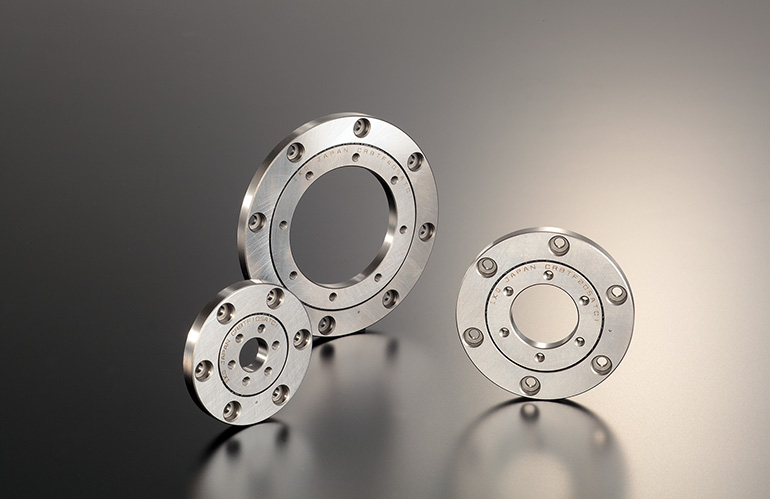
CRBT ir CRBTF sukryžiuotų ritininių guolių išmatuoja tik 5,5 mm aukščio ir 5 mm pločio. Šaltinis: IKO
- Kontroliuojamas linijinis judesys. Linijiniai judesių valcavimo vadovai būna įvairių dydžių, todėl jie yra tinkami skirtingoms humanoidinio kūno dalims. Pvz., Griežtai ir galiniai efektoriai, kurie imituoja pirštus, dažnai naudojami objektams suvokti, todėl tiksliai turi būti atidaryti ir užsidaryti. Linijiniai judesių riedėjimo kreiptuvai yra labai svarbūs renkantis ir dedant užduotis, suteikdami roboto pirštus tik tinkamą užspaudimo jėgą, kad būtų galima manipuliuoti objektu, tuo pačiu leisdami jiems būti pakankamai veržliems, kad būtų išvengta objekto sugadinimo.
Vienas iš tokių vadovų, „IKO“ ML serijos, yra mažiausių pramonės dydžių, o LWL yra tik 1 mm (0,03 colio) pločio. Daugelis jo guolių gali pasigirti recirkuliacinio rutulinio tipo dizainu, kad būtų užtikrintas tikslus, kontroliuojamas judesys.
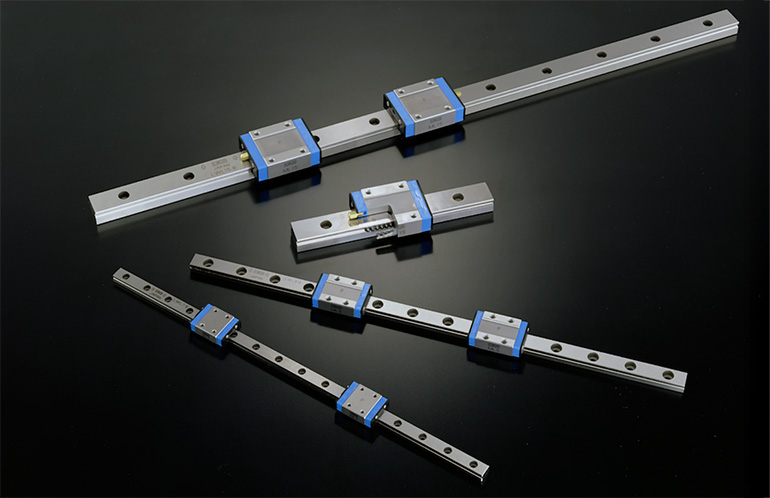
IKO teigia, kad ML serijos linijiniai judesių riedėjimo vadovai yra mažiausi pramonės dydžiai. Šaltinis Iko
„IKO“ vadovus taip pat galima įsigyti standartinėmis ir labai griežtomis ilgomis versijomis, kurias galima suprojektuoti į roboto liemenį, rankas ar kojas, kad būtų galima išplėsti, pavyzdžiui, pasiekti, pavyzdžiui, pasiekti aukštą lentyną. Šie vadovai netgi gali būti naudojami roboto kaklelyje, kad galva galėtų būti bendraamžių aukščiau arba aplink kliūtis, kad būtų galima geriau „pamatyti“ jo aplinką.
- Sferiniai paprasti guoliai, dar žinomi kaip įvorės, stabilizuoja humanoidines galūnes, kai jos pasuka ir imituoja žmogaus veiksmus. Pavyzdžiui, daugelio humanoidų pėdos gale yra strypas, jungiantis prie bazinės plokštės. Su sferiniais paprastais guoliais tokio tipo dizaine kojos ir kulkšnys gali pasisukti, pasukti ar pasilenkti į priekį ar atgal.
- Griebti ir pasukti daiktus. CAM pasekėjai yra pageidautini daugelyje vidinių dizainų, kuriems reikalinga dalis važiuoti ant kumštelio ir gali būti pritvirtinti virš apskrito lanko, kad būtų daugiau laisvės laipsnių.
IKO teigė, kad siūlo keletą mažiausių CAM pasekėjų rinkoje, įskaitant vienetus, kurių smeigių skersmuo yra maža 1,4 mm (0/05 colio). Šie komponentai taip pat turi vidinį dizainą, kuris tvarko traukos apkrovas be reikšmingo produkto skaidymo.

Linijiniai vadovai gali padėti humanoidiniam robotui išplėsti savo pasiekiamumą. Šaltinis: IKO
Našumo patobulinimai apima judesio kompromisus
Kadangi humanoidiniai robotai yra skirti užimti tą pačią aplinką kaip ir žmonės, ir manipuliuoti vienodo dydžio objektais, tokiais kaip sandėlio rinkiniai, gali būti lengva galvoti, kad standartiniai judesio komponentai yra būtini. Bet kai nusprendėte dėl reikalingo komponento tipo, vienintelis jūsų sistemos veiklos gerinimo apribojimas yra jūsų sugebėjimas optimizuoti savo judesio tikslus.
Kalbant apie našumo patobulinimus, svarbu atsiminti, kad humanoidiniai dizainai yra su kompromisais, kurie paprastai kelia sunkius klausimus. Turėkite patikimą judesio komponentų tiekėją įvertinti jūsų poreikius, patarkite apie savo galimybes ir padėkite pateikti atsakymus. Todėl verta glaudžiai bendradarbiauti su jūsų komponentų gamintoju, ypač kai jūsų humanoidinio dizaino tikslai yra:
- Judesio valdymas. Bet kokiam jungtims, kuriam reikia pasukti, pasukti, pasukti ar virpėti, reikės judesio komponentų. Tačiau norint imituoti žmogaus judesius, įvairioms sąnariams ir pavaroms reikės dirbti veiksmingai judesio kontrole. Pvz., Štai kaip jūsų judesio komponentų gamintojas gali padėti jums išspręsti problemas, susijusias su aukšto tikslumo ir sklandaus sukimosi tradiciniame robotiniame sąnaryje:
Nors du ploni pjūvių guoliai gali atlikti darbą, jie sunaudos daug vietos ir kainuos brangiai. „IKO CRB“ gali pašalinti dviejų guolių sistemą. Jie integruoja du guolius į vieną platformą per ritinėlius, išdėstytus „X“ modelyje, leisdami jiems valdyti didelę ašinę, radialinę ir momentinę apkrovą vienu metu atlikti sudėtingas užduotis taupant erdvę. Tinkinimas gali apimti papildomus flanšus ar skirtingus varžtų modelius, kad būtų galima supaprastinti diegimą.
Komponentai be priežiūros palaiko humanoidus judant
Humanoiduose, kaip ir bet kuriame įrenginyje su judesių sistemomis, svarbiausias rūpestis yra laikymas guolių ir kitų komponentų tinkamai suteptų komponentų. Tikimasi, kad daugelis humanoidų pakartos užduotis daugybę tūkstančių kartų, nepablogę judančių dalių. Ir šios dalys paprastai yra integruotos į sandarias erdves.
IKO išsprendžia šią „C-Lube“ problemą-sutepimo elementą, įmontuotą į daugelį produktų, įskaitant linijinius kreipiklius ir CAM pasekėjus. Linijiniuose vadovuose „C-Lube“ tiekia tepimo alyvą į jo valcavimo elementų paviršius, nesikreipdama į vikšro bėgį. Ši įmontuota tepimo sistema gali veikti be priežiūros penkeriems metams arba 12 500 mylių. (20,116,8 km) ir už jos ribų. Apibendrinant, „C-Lube“ komponentai užtikrina ilgalaikius, be priežiūros, kad jūsų humanoidiniai robotai išliks judėjimo metu.
- Tinka esamą darbo aplinką. Pažangios judesio kontrolės strategijos taip pat kartais būtinos norint gauti humanoidą atlikti atskiroje darbo aplinkoje. Tarkime, kad robotas turi tvarkyti objektą lentynos aukštyje ar gylyje, kurio žmogus gali nepavykti pasiekti. Tinkamas judesio komponentų gamintojas gali pridėti linijinius išplėtimo mechanizmus prie rankų ar kojų arba modifikuoti liemenį, kad sukurtų fizinę struktūrą, kuri galėtų įveikti žmogaus fizinius apribojimus ir prisitaikyti prie sudėtingesnės darbo aplinkos.
- Sumažinkite priežiūros reikalavimus. Sumažinti ir numatyti priežiūros poreikius yra svarbūs aspektai kuriant judesio sistemas, kurios, tikimasi, nuosekliai atliks dešimtis tūkstančių kartų be degradacijos. Nors kai kurie komponentai, turintys integruotus jutiklius, gali, pavyzdžiui, perspėti operatorius į mechaninę pažeidimą, IKO stengiasi gaminti produktus, kurie be priežiūros, per visą programos laiką.
„C-Lube“ yra įmontuota tiesinių kreiptuvų tepimo sistema. Šaltinis: IKO
Individualizuoti komponentai suteikia humanoidų laisvą judesį
Kadangi humanoidiniai robotai yra skirti laisvai judėti, kai jie imasi užduočių ir aplinkos, pasirinktiniai judesio komponentai yra labai svarbūs siekiant palengvinti judėjimą, taip pat optimizuoti produktyvumą ir patikimumą. Kurdami pasirinktinį savo humanoidinio roboto sprendimą, turėkite omenyje kai kurias iš šių geriausių praktikų – naudodamiesi sukryžiuotais ritininiais guoliais kaip pavyzdį. Atminkite, kad humanoiduose gali būti net dvidešimt CRB.
- Užtikrinkite judesio tikslumą. Kaip ir stacionarių robotų atveju, tikslus judesys yra būtinas. Kryžminiai ritininiai guoliai yra sukurti taip, kad užtikrintų didelį tvirtumą ir padėties nustatymo tikslumą. Šį tikslumą galima dar labiau optimizuoti, o atsilikimą galima pašalinti, pavyzdžiui, pridedant lengvą išankstinį įkrovą arba sumažinant robotų jungčių klirensą, kuris taip pat leidžia sklandžiai judėti.
- Sumažinkite energijos suvartojimą. Kuo mažesnė galia, kurią humanoidas turi įvykdyti savo misiją, tuo ilgesnis akumuliatoriaus veikimas. Kryžminiai ritininiai guoliai gali būti pritaikyti pagal užsakymą, kad būtų galima efektyviau paskirstyti apkrovas, parodyti mažesnį sukimosi sukimo momentą, sumažinti trintį per separatorius, pašalinti atsilikimą arba naudoti lengvesnes svorio medžiagas, kurios gali padėti sumažinti energijos suvartojimą.
- Apsvarstykite galimybę diegti ir surinkti. CRB suteikia robotų sąnariams galimybę pasukti, o tinkamas tvirtinimas yra svarbiausia užtikrinant tikslumą ir užkirsti kelią netinkamam poslinkiui bei pačių guolių pažeidimui. Pasirinktinės parinktys gali apimti specialius korpusus, plokšteles, flanšus ir tvirtinimo skylutes.
- Nurodykite komponentus, kad atsistėčiau iki atšiaurių sąlygų. Daugelyje programų lydinys 52100 suteikia gerą stiprumą ir anti-nuovandenių charakteristikas. Tačiau kai kurie humanoidai bus dislokuoti atšiaurioje aplinkoje, reikalaujant atsparumo korozijai nerūdijančiam konstrukcijai arba specialiems sandarikliams, kad būtų galima atstumti dulkes ir nešvarumus, taip pat užkirsti kelią riebalų nutekėjimui. Juodosios chromo ir plonos tankios chromo paviršiaus procedūros taip pat suteikia veiksmingą apsaugą daugelyje atšiaurių aplinkų.
- Nepamirškite priežiūros. Iko rekomenduoja alternatyvas, tokias kaip sausos plėvelės tepalas, kad būtų galima sumažinti trintį ar net skystų kristalų tepalą švariai aplinkai, IKO rekomenduoja alternatyvas.
Anksti bendradarbiaukite su savo judesio komponentų tiekėju
Kai nurodote „Humanoid Robot“ programų pasirinktinius judesio komponentus, svarbu susisiekti su savo tiekėju projektavimo proceso pradžioje, kad būtų išvengta papildomo darbo, kuris laikui bėgant gali atsirasti. „IKO“ naudoja savo didelę patirtį CRB, linijiniams judesio komponentams, sferinėms įvorėms ir CAM pasekėjams pasirinktiniuose sprendimuose, kurie apima visas sąlygas ir scenarijus, kurie, jūsų manymu, susidurs su „Humanoid“.
Mes dirbame su klientais kiekviename žingsnyje, įskaitant pasirinktinės dalies testavimą ir patvirtinimą, kad ji veiktų taip, kaip tikėtasi, kai humanoidas eina į darbą. Nesvarbu, ar judesio komponentas yra skirtas gaminti, globoti, prižiūrėti namus ar įvykdyti užsakymus, „IKO“ yra pasirengę padėti jums sukurti pasirinktinį judesio produktą, kuris veiks patikimai ir užtikrins ilgą, produktyvų gyvenimą.
Apie autorių
Karlas Wickenheisseris yra pardavimų ir rinkodaros viceprezidentas Parsippany mieste, NJ įsikūrusi „IKO International Inc.“. Jis yra licencijuotas profesionalus inžinierius ir guolių pramonės veteranas, turintis daugiau nei 38 metų tarptautinę patirtį „IKO“, „Torrington Co.“, „Fag“ guolių ir RBC guolių.
Aktyvus tiek guolių specialistų asociacijos (BSA), tiek galios perdavimo platintojų asociacijos (PTDA) narys, „Wickenheisser“ yra Stevenso technologijos instituto absolventas, turintis mechanikos inžinerijos bakalauro laipsnį (BEME). Jis taip pat turi MBA iš Fairfieldo universiteto.
IKO turi 50 metų judesio kontrolės patirtį. Bendrovės produktuose yra adatų ritininių guolių, linijinių judesių valcavimo kreiptuvų, tikslios padėties nustatymo lentelės, „C-Lube“ technologija ir mašinų komponentai.
Redaktoriaus pastaba: Sužinokite daugiau apie humanoidinių robotų plėtrą „Robobusiness 2025“, kuris vyks spalio 15 ir 16 dienomis Santa Klaroje, Kalifornijoje.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}