











„Boston Dynamics“ paskelbė naują vaizdo įrašą, kuriame pabrėžiama, kaip jo naujas, elektrinis „Atlas Humanoid“ atlieka užduotis laboratorijoje. Aukščiau galite žiūrėti vaizdo įrašą.
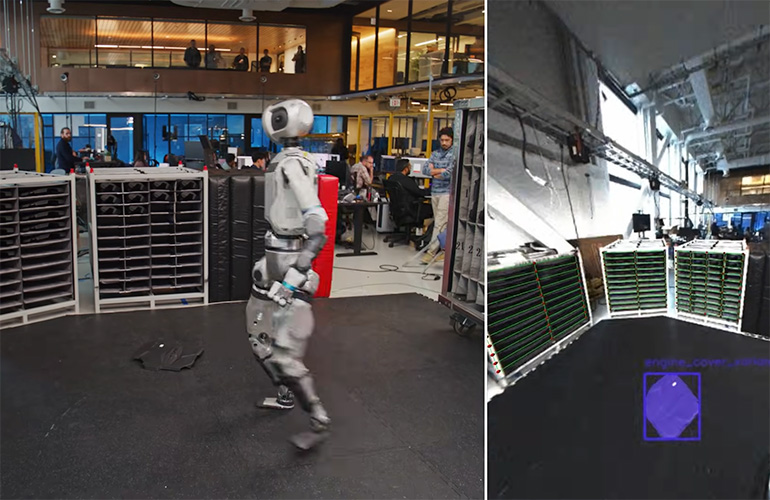
Pirmas dalykas, kuris mane užklupo nuo vaizdo įrašo, yra tai, kaip „Atlas“ demonstruoja savo realiojo laiko suvokimą. Vaizdo įraše parodyta, kaip „Atlas“ aktyviai registruoja savo variklio dangčių atskaitos rėmus ir visas rinkimo/vietos vietas. Robotas nuolat atnaujina savo supratimą apie pasaulį, kad efektyviai tvarkytų dalis. Kai jis ką nors pakelia, jis įvertina dalies topologiją – kaip su ja susitvarkyti ir kur ją sudėti.
Atlasas suvokia rankoje laikomos dalies topologiją, nes ji įgyja dalį iš lentynos. | Kreditas: Bostono dinamika
Tada demonstracinėje versijoje yra šis momentas 1:14, kur inžinierius numetė variklio dangtį ant grindų. „Atlas“ reaguoja taip, lyg išgirstų, kad dalis smogė į grindis. Tada humanoidas apsižvalgo, nustato dalį, išsiaiškina, kaip ją pasiimti (dar kartą, įvertinant jos formą) ir į variklio dangtelio sritį įdėkite ją būtinu tikslumu.
„Šiame konkrečiame klipe paieškos elgesys yra rankiniu būdu suaktyvinamas“, – sakė Scott Kuindersma, Bostono dinamikos robotikos tyrimų vyresnysis direktorius “, – sakė Bostono dinamikos robotikos tyrimų direktorius“. Roboto ataskaita. „Robotas nenaudoja garso užuominų, kad aptiktų variklio dangtelį, smogiantį į žemę. Robotas autonomiškai„ suranda “objektą ant grindų, todėl praktiškai mes galime pasyviai paleisti tą patį matymo modelį ir suaktyvinti tą patį elgesį, jei variklio dangtis (ar kokia mes dirbame) yra aptinkami iš fiksavimo įprasto veikimo metu.“
Vaizdo įraše pabrėžiamas „Atlas“ sugebėjimas pritaikyti ir suvokti jo aplinką, pakoreguoti jo pasaulio idėją ir vis tiek laikytis paskirtos užduoties. Tai parodo, kaip „Atlas“ gali tvarkyti chaotišką aplinką, išlaikyti savo užduoties tikslą ir pakeisti savo misiją skrendant.
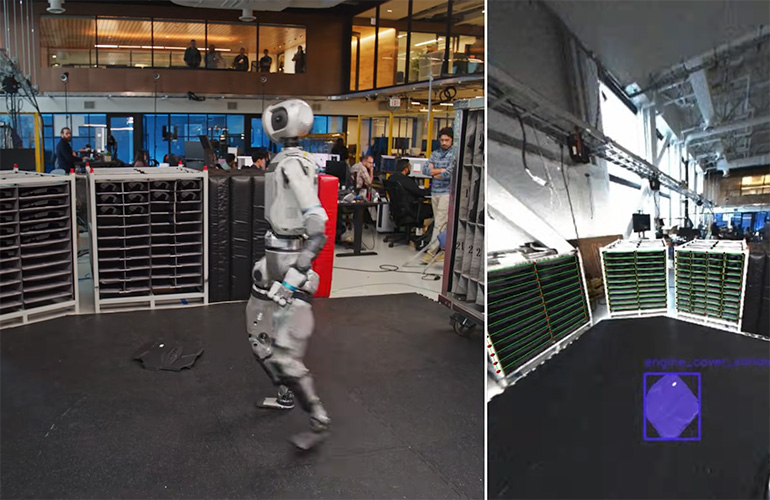
Atlas gali nuskaityti grindis ir nustatyti dalį ant grindų, kuri ten nepriklauso. | Kreditas: Bostono dinamika
„Kai objektas yra susijęs su kameromis,„ Atlas “naudoja objekto pozos įvertinimo modelį, kuriame naudojamas pateikimo ir kompozicijos metodas, norėdamas įvertinti pozą iš monokulinių vaizdų“,-tinklaraštyje apie vaizdo įrašą rašė Bostono dinamika. “Modelis yra mokomas didelio masto sintetinių duomenų ir apibendrina nulinį vaizdą į naujus objektus, kuriems buvo suteiktas CAD modelis. Kai inicijuota 3D poza, modelis itereatyviai patikslina jį, kad būtų sumažintas neatitikimas tarp pateikto CAD modelio ir užfiksuoto fotoaparato atvaizdo. Arba, pozos įvertinimas gali būti inicijuotas iš 2D regiono, esančio priorite (tokiu objektu). kurie yra maitinami pagal balų modelį, o geriausiai tinkama hipotezė yra patobulinta.
Matau, todėl esu
„Robot Vision“ rekomendacijos buvo perspektyvios nuo 1990 m. Tuo metu robotai galėjo sekti elementus judančiuose konvejeriuose ir sureguliuoti vietinius atskaitos rėmus, skirtus grandinės lentos surinkimui, remiantis fiducialais. Apie šį moderniausią robotų matymo patarimus nieko nestebina ar nauja.
Tai, kas dabar yra išskirtinė humanoidams, yra roboto mobilumas. Bet koks mobilus manipuliatorius turi nuosekliai atnaujinti savo pasaulio žemėlapį. Šiuolaikinės roboto matymo gairės naudoja „Vision“ kalbos modelius (VLM), kad suprastų pasaulį per fotoaparato akis.
Tie vyresni pramoniniai robotai buvo pritvirtinti prie žemės ir panaudojo 2D matymo ir sudėtingos kalibravimo tvarką, kad būtų pažymėta fotoaparato regėjimo laukas. Tai, ką mes matome su „Atlas“, yra mobilus, humanoidinis robotas, suprantantis jo aplinką ir tęsiantis užduotį, net kai aplinka keičiasi aplink robotą. Šiuolaikiniai robotai turi 3D supratimą apie juos supantį pasaulį.
„Boston Dynamics“ pripažįsta, kad ši demonstracinė versija yra AI pagrįstų funkcijų derinys (pvz., Suvokimas) ir kai kurie procedūriniai misijos valdymo programų programos. Vaizdo įrašas yra geras programinės įrangos evoliucijos galimybių progreso demonstravimas. Kad šios sistemos veiktų realiame pasaulyje, jos turi atlikti ir subtilius pokyčius, ir makrokomandos pokyčius jų veikimo aplinkoje.
Keliaudamas per pasaulį
Stebėti „Atlas Move“ įdomu. Kartais judesiai atrodo šiek tiek keistai, tačiau tai puikus iliustracija, kaip AI suvokia pasaulį ir pasirinkimus, kuriuos jis daro judėti per pasaulį. Vaizdo įraše turime tik liudyti nedidelę šio sprendimo priėmimo gabaliuką.
„Boston Dynamics“ anksčiau paskelbė vaizdo įrašą, kuriame rodomas judesio fiksavimo (MOCAP) pagrįstas elgesys. MOCAP vaizdo įrašas parodo sistemos judrumą ir tai, ką ji gali padaryti sklandžiai. Šio naujausio vaizdo įrašo, priėmus AI sprendimus ir kontroliuojant, trūkčiojimas yra toli nuo „Uncanny Valley Involling Mocap“ demonstracijų. Mes taip pat pristatėme „Boston Dynamics CTO Aaron Saunders“ kaip pagrindinį pranešėją 2025 m. Robotikos viršūnių susitikime ir parodoje Bostone.
„Atlas“ tebėra daug realaus laiko apdorojimo, kad suprastų savo pasaulį. Vaizdo įraše matome, kaip robotas sustoja apdoroti aplinką, prieš priimant sprendimą ir tęsiant. Esu įsitikinęs, kad laikui bėgant tai greičiau, nes kodas vystosi, o AI modeliai tampa geresni jų supratimu ir pritaikomumu. Manau, kad dabar yra lenktynės: AI pagrįstos programinės įrangos kūrimas, leidžiantis šiems robotams pritaikyti, suprasti jų aplinką ir nuolat mokytis iš įvairių daugiaragentinių duomenų.
Redaktoriaus pastaba: Šis straipsnis buvo atnaujintas 13.46 val. Rytiniame ryte, pateikiant Scott Kuindersma, Bostono „Dynamics“ robotikos tyrimų direktoriaus vyresniąją direktorių.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}