











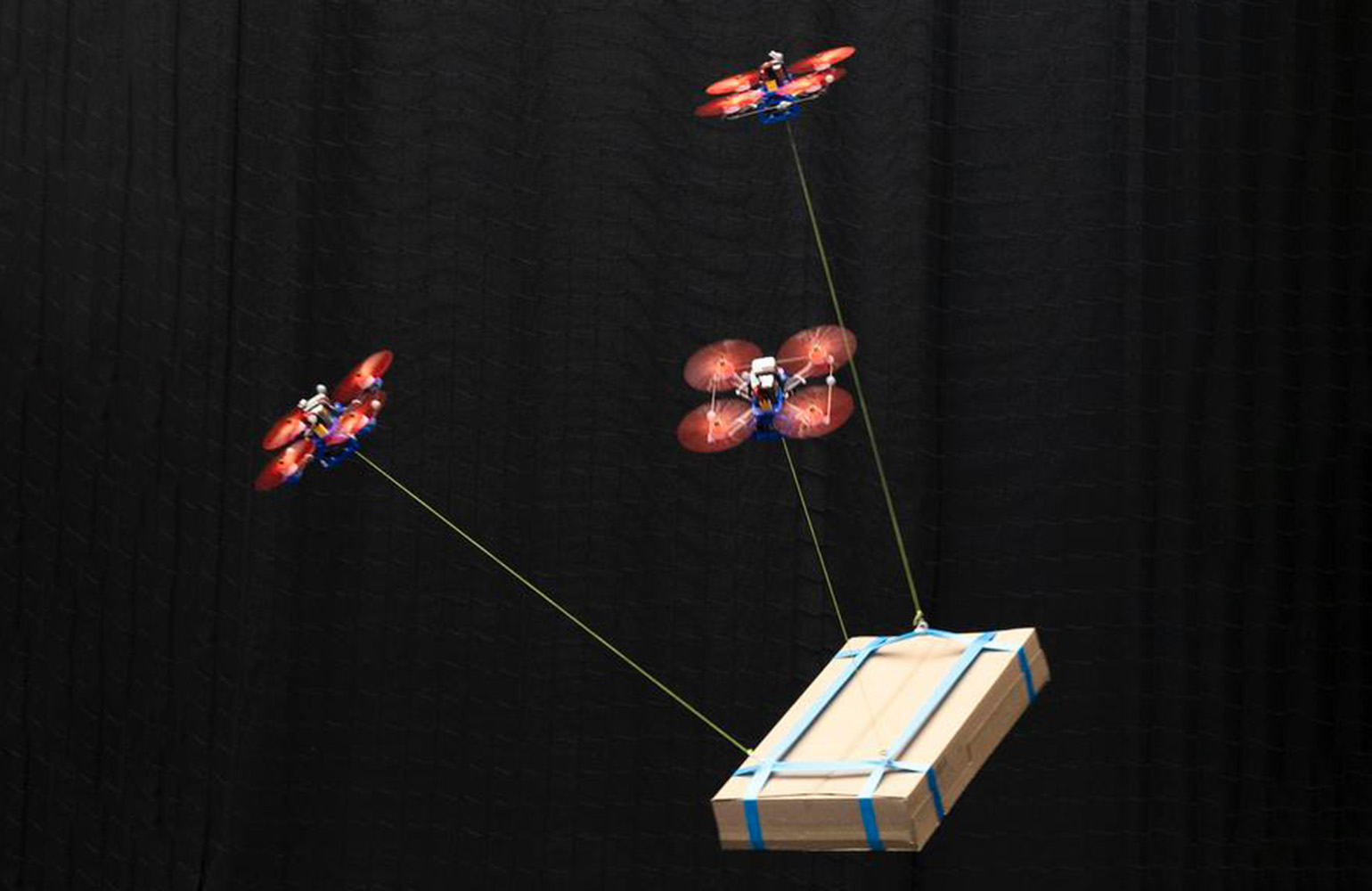
Trys dronai dirba kartu, kad gabentų paketą, naudodami naują TU Delfto algoritmą. | Šaltinis: Sihao Sun
Nyderlandų TU Delfto mokslininkai sukūrė algoritmą, leidžiantį keliems autonominiams dronams dirbti kartu valdyti ir transportuoti sunkius krovinius. Tai veikia net vėjuotomis sąlygomis, – sakė universiteto mokslininkai.
Jie tvirtino, kad naujasis algoritmas yra tinkamas pasiekti ir prižiūrėti sunkiai pasiekiamą infrastruktūrą, pavyzdžiui, vėjo jėgaines jūroje. Dėl dažnai atšiaurių oro sąlygų, ribotos naudingosios apkrovos ir nenuspėjamo sąlyčio su aplinka dabartiniams dronams sunku veikti saugiai ir efektyviai.
„Vienas dronas gali nešti tik labai ribotą krovinį“, – aiškino TU Delfto robotikos tyrėjas Sihao Sunas. „Dėl to sunku naudoti bepiločius orlaivius tokioms užduotims kaip sunkių statybinių medžiagų pristatymas į atokias vietoves, didelių pasėlių kiekių transportavimas kalnuotuose regionuose arba pagalba gelbėjimo misijose.
Algoritmas sprendžia greitą koordinavimą
Siekdama įveikti šiuos apribojimus, technikos universiteto komanda sukūrė sistemą, kurioje keli dronai yra prijungti prie naudingosios apkrovos kabeliais. Tai leidžia jiems vežti daug sunkesnius krovinius, sakė TU Delft.
Reguliuodami savo pozicijas realiu laiku, dronai gali ne tik pakelti ir transportuoti sunkius daiktus, bet ir valdyti jų orientaciją. Tai labai svarbu norint tiksliai įdėti į sudėtingą aplinką.
“Tikrasis iššūkis yra koordinavimas”, – sakė Sun. „Kai dronai yra fiziškai sujungti, jie turi reaguoti vienas į kitą ir į išorinius trikdžius, tokius kaip staigūs naudingosios apkrovos judesiai greitais judesiais. Tradiciniai valdymo algoritmai tam tiesiog per lėti ir nelanksti.
„Mes sukūrėme savo kvadrorius ir išbandėme juos kontroliuojamoje laboratorijos aplinkoje“, – pridūrė jis. „Naudojome iki keturių dronų vienu metu, pridėjome kliūčių, imitavome vėją su ventiliatoriumi ir netgi naudojome judantį naudingąjį krovinį, pavyzdžiui, krepšinį, kad išbandytume dinamines reakcijas.
Sistema išlaikė visus testus. Ir kadangi dronai yra autonomiški, jiems tereikia nurodyti paskirties vietą. Jie naršo savarankiškai, prisitaikydami prie kliūčių ir trukdžių kelyje.
„Tu tiesiog pasakyk jiems, kur eiti, o jie išsiaiškins visa kita“, – prisiminė Sun.
TU Delftas planuoja naudoti realiame pasaulyje
TU Delft komanda teigė, kad jos naujasis algoritmas yra greitas, lankstus ir tvirtas. Jis gali prisitaikyti prie besikeičiančių naudingųjų apkrovų ir kompensuoti išorines jėgas, nereikalaujant jutiklių pačiame krovinyje. Tai yra svarbus pranašumas realaus pasaulio scenarijuose.
Šiuo metu sistema naudoja išorines judesio fiksavimo kameras patalpų bandymams, todėl kol kas nėra naudinga lauko aplinkoje. Komanda teigė, kad tikisi parengti technologiją realiame pasaulyje. Jis gali būti pritaikytas paieškos ir gelbėjimo, žemės ūkio ir nuotolinės statybos srityse.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}