











„Tum Mirki“ AI robotų saugos ir performanso centre tyrėjai Kübra Karacan, Robin Kirschner ir Alessandro Melone (ROM iš kairės į dešinę) išanalizavo robotų manipuliatorių jautrumą. | Kreditas: TUM
Miuncheno robotikos ir mašinų žvalgybos instituto arba Miuncheno technikos universiteto Miuncheno instituto tyrėjai sukūrė „robotų medį“, naują vertinimo schemą, skirtą autonominių robotų jautrumui įvertinti. Jie sakė, kad jautrumas yra labai svarbus saugiai ir lanksčiam žmogaus-roboto sąveikai, ir nebuvo įprasto būdo tai įvertinti.
Miuncheno technikos universiteto (TUM) tyrėjai teigė, kad nauja schema leis palyginti pramoninius robotus ir galiausiai kitas robotų sistemas, tokias kaip mobiliosios platformos, humanoidai ir robotų rankos.
„Toks standartas galėtų paruošti kelią sparčiai besiplečiančios robotikos rinkos kokybiškam antspaudui“, – tvirtino prof. Achim Lilienthal, MIRMI direktoriaus pavaduotojas ir intelektualių sistemų profesoriaus TUM. „Robotų sistemos veiklos galimybių žinojimas yra didžiulė pagalba pramonei, kur įmonės nori kuo geriau panaudoti robotų sistemas“.
„„ Tum Mirmi “bandymo metodika gali tapti pramoninio testavimo standartu“, – sakė jis. „Robotų sistemos veiklos galimybių žinojimas yra didžiulė pagalba pramonei, kur įmonės nori kuo geriau panaudoti robotų sistemas“.
Kategorizavimas veda į robotų medį
Tyrėjai pradėjo nagrinėdami ir suskirstydami į kategorijas iš įvairių gamintojų, kurie naudojami tiek pramonėje, tiek tyrimuose.
Nepaisant to, kad dažnai atrodo panašios, šios robotinės rankos turi aiškias jutiklių, variklių ir vidaus valdymo sistemų savybes. Tai lemia esminius jų pagrindinių galimybių skirtumus: kai kurie „Excel“ galią ir tikslumą, o kiti yra skirti lanksčiai ir jautriai bendravimui su aplinka ir ruošiniais.
Norėdami iliustruoti šiuos variantus ir nuolatinį robotikos pažangą, „Tum Mirki“ AI robotų saugos ir našumo centro tyrėjai sukūrė robotų medį. Įkvėptas Charleso Darwino gyvenimo medžio, ši vizualizacija iliustruoja įvairias įvairių robotų rūšių adaptacijas jų atitinkamoms buveinėms.
Tyrėjai nustatė 25 specifinius matavimus, apibūdinančius roboto jautrumą fizinio kontakto metu. Šie matavimai padeda nustatyti, ar paviršiaus jėga, pavyzdžiui, suderinta su numatyta jėga, ar robotas galėtų sužeisti žmogų.
Iš šių 25 matavimų sugeneruota vorų schema leidžia greitai vizualiai įvertinti roboto jautrumą, net tiems, kurie neturi specializuotų žinių.
Remiantis jų našumu, robotinės sistemos priskiriamos pramoniniams robotams, voratinkliams, minkštiems robotams ir „lytėjimo robotams“. Pavyzdžiui, chirurginiai robotai pirmiausia vertinami pagal jų tikslumą. Sandėlio ar gamyklos programoms pabrėžiamas stiprumas ir atsparumas – jų gebėjimas atlikti pasikartojančius judėjimus per ilgą laiką.
„Mes sujungiame esamą judesio metriką su savo nauja lytėjimo metrika, kad pateiktume pirmąją visų laikų robotinės sistemos fizinės sąveikos visumos apžvalgą“,-pažymėjo laboratorijos direktorius Robinas Kirschneris.
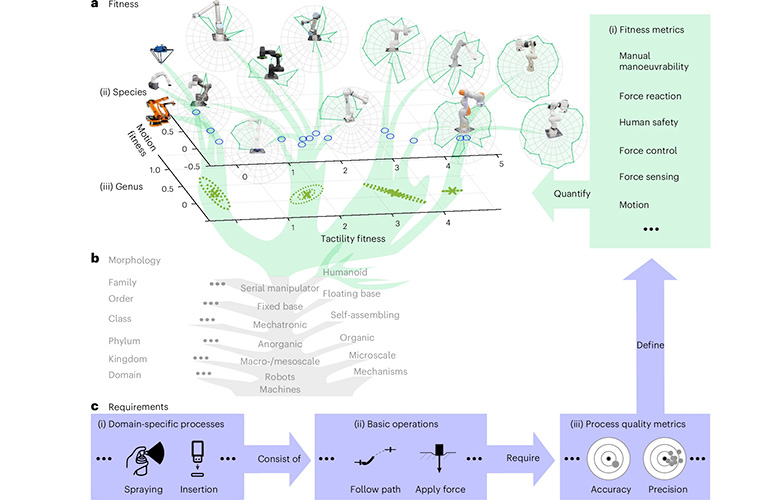
Taksonomija, susidedanti iš komponentų, pagrįstų sistemos architektūra (pilka), įsikūnijimo našumu (žalia) ir procesu (mėlyna). A, robotų fitneso klasifikacija: (i) kūno rengybos metrika, apibrėžianti žaliųjų vorų sklypus, būtent robotų kūno rengybos spektrą; ii) įkūnijimo rūšys, apibrėžtos pagal bendrą kūno rengybos balą, nubraižytą per judesį ir lytėjimo tinkamumą; (iii) Genties grupės, suskirstančios robotų rūšis į proceso kūno rengybos kategorijas. B, hierarchinė morfologijos vaizdas. C, Proceso automatizavimo reikalavimai, kurie perkeliami į reikiamą robotų kūno rengybos metriką (i) nustatant domeno specifinius procesus; ii) reikiamų pagrindinių operacijų išskaičiavimas; (iii) Kokybės metrika, apibūdinanti procesą, kuris apibūdina reikiamą įsikūnijimo kūno rengybos metriką. | Kreditas: TUM
TUM gali būti robotų vokiečių bandymų centras
2025 m. Vasario mėn. Komanda paskelbė tiriamąjį dokumentą pavadinimu „Robotų robotai pagal„ Performance Fitness “į robotų medį.
Prof. Lorenzo Masia, „Tum Mirmi“ vykdomasis direktorius, pridūrė: „Remdamasis originalia idėja, esu tikras, kad AI robotų saugos ir veiklos centras Tum Mirmi taps nepriklausomu nacionaliniu robotikos testavimo centru.“
Penkių narių direktorių valdyba prižiūri Tum Mirki tyrimų ir inovacijų strategiją, pagrindinį mokymo turinį ir naujų tikslinių grupių sukūrimą. Plokštė apima:
- Prof. Masia, vykdomasis direktorius
- Prof. Lilienthal, strategijos ir partnerystės direktoriaus pavaduotojas ir direktorius
- Prof. Angela Schoellig, pramonės ir tarptautinių reikalų direktorė
- Prof. Eckehard Steinbach, startuolių ir infrastruktūros direktorius








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}