












|
Klausykite šio straipsnio |
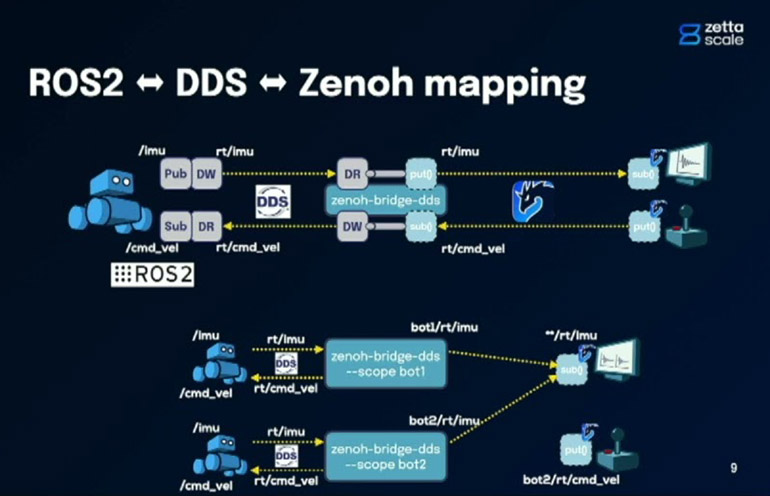
„Zenoh“ yra tarpinė programinė įranga, skirta užtikrinti keičiamo dydžio duomenų perdavimą įvairiose technologijose. Šaltinis: ZettaScale
„ZettaScale Technology Ltd.“ teigia, kad mobilieji robotai gali būti naudingi kelioms pramonės šakoms, tačiau standartinei duomenų paskirstymo paslaugai arba DDS tarpinei programinei įrangai sunku neatsilikti nuo belaidžio ryšio aplinkoje. Tai riboja ryšius ir mastelio keitimą, sakė JK įsikūrusi bendrovė.
„ZettaScale“ sukūrė „Zenoh“ protokolą, kuris, pasak jos, užtikrina patikimą transporto priemonių, daiktų interneto (IoT) įrenginių ir robotų ryšį dinaminėje aplinkoje. 2022 m. bendrovė atsisakė DDS tyrimų ir plėtros, skirto oro erdvės ir karinių programų eismo kontrolei, paaiškino Angelo Corsaro, vyriausiasis technologijų pareigūnas ir ZettaScale generalinis direktorius.
Praėjusį mėnesį „Eclipse Foundation“ paskelbė apie „Eclipse Zenoh 1.0.0“ – atvirojo kodo protokolo, skirto integruoti ryšį, saugojimą ir skaičiavimą įterptosiose sistemose ir debesų platformose, išleidimą. Fondas ir „ZettaScale“ pažymėjo, kad naujasis leidimas pagrįstas ilgamečiu darbu ir realaus diegimo patirtimi.
DDS veikia gerai, su apribojimais
2015 m. pastangos sukurti atsparų protokolą, kuris pakeistų IP naujos kartos internetui, vis dar buvo pagrįstos telefono grandinės perjungimu. DDS buvo optimizuotas pagal pradinį tikslą, tačiau jis turėjo apribojimų, pažymėjo Corsaro.
„Mūsų komanda taip pat atliko kai kuriuos ankstyvuosius išmaniojo miesto darbus, pvz., Nicos Prancūzijoje ir Schneider bei Cisco Barselonoje“, – sakė jis. Roboto ataskaita. „Viena mūsų problemų buvo ta, kad sistemose, apimančiose nuo mikrovaldiklio iki duomenų centro, turėjome sujungti du ar tris skirtingus duomenų srauto protokolus. DDS netilptų ant mikrovaldiklio, o laidinis protokolas nebuvo skirtas ribotiems tinklams.
„Problema ta, kad DDS buvo naudojamas ne projektavimo erdvėje“, – paaiškino Corsaro. „Kai kūrėme DDS, naudojome uždarą sistemą, laidinį tinklą ir prielaidą, kad paketų praradimas buvo mažas. Ir tai atsitinka sistemoje, kuri yra gerai išmatuota.
„Taigi DDS atsirado iš karinio jūrų laivyno mūšio valdymo sistemos, kur jūs turite sistemą, kuri yra visiškai gerai išmatuota“, – pridūrė jis. „Vidutiniškai 50 % procesoriaus ir tinklo lieka tuščias. Ir viskas išmatuota taip, kad galėtumėte naudoti multicast ir neprarastumėte paketo. Sistemos yra galingos ir simetriškos. Tokiame kontekste DDS stulbina, bet jei išeisite iš šio konteksto, tai bus sudėtinga.
 Kreipkitės kalbėti.
Kreipkitės kalbėti.
Zenoh sukurtas duomenims valdyti ramybės ir judėjimo metu
Corsaro sakė norintis išspręsti dvi problemas. Pirmasis buvo sukurti protokolą, kuris veiktų su mažos galios įterptinėmis sistemomis ir ribotais tinklais.
„Kitos idėjos buvo suvienodinti abstrakciją, kurią naudojame tvarkydami judančius duomenis, taip paskirstydami duomenis ir duomenis ramybėje, o tai reiškia užklausą“, – prisiminė Corsaro. Stengdamasis decentralizuoti duomenų saugojimą „rūko skaičiavimui“ Barselonoje, jis nustatė, kad norint gauti visame tinkle paskirstytus duomenis, reikia protokolų.
„Zenoh“ pašalina topologinius apribojimus, susijusius su skaičiavimo diegimu, todėl galite dirbti per savavališkus tinklelius interneto mastu“, – sakė Corsaro. „Ši diskusija apie tai, kur turėtume tai įdėti – debesyje ir kraštinėje – tampa nereikšminga, nes laikote saugyklą ir skaičiuojate, kur tai prasminga, o duomenys visada eina trumpiausiu keliu.
Nuo telekomunikacijų iki ROS 2
DDS tyrėjai pradėjo dirbti su Zenoh, finansuodami telekomunikacijų bendroves, o tai leido eksperimentuoti ir patvirtinti išmaniojo miesto telemetrijos 5G tinkluose kontekste, sakė Corsaro.
„Žmonės jį pradėjo naudoti robotikoje atsitiktinai, nes mes iš tikrųjų buvome orientuoti į telekomunikacijas“, – pažymėjo jis. „Kai mes pradėjome rodyti, kaip galite jį naudoti su ROS (atvirojo kodo robotų operacine sistema), tai tikrai pradėjo veikti.
„ZettaScale“ atsiskyrus, „TG Tech Auto“ pamatė galimybę savo protokolus pritaikyti automobilių pramonei, todėl bendradarbiavo ir tapo akcininku.
„Matome didžiulę robotikos ir automobilių konvergenciją, o „Zenoh“ buvo priimtas „General Motors“ uProtocol iniciatyva“, – sakė Corsaro. „Tai architektūros ir technologijų konvergencija. Šiandien Azijoje yra automobilių, kurie iš tikrųjų veikia ROS 2.
ROS 2 taiko lengvesnį, „kodas pirmiausia“ metodą, o AUTOSAR konsorciumas kuria struktūrizuotą mainų ir sąveikumo formatą. Tačiau ROS 2 turi atitikti automobilių sertifikavimo standartus, pripažino Corsaro.
Tokios įmonės kaip „Intrinsic“ ir „Apex.AI“ stengiasi sujungti platformas. Intrinsic naudoja Zenoh su ROS 2 Jazzy Jalisco.
„Tai labai įdomus laikas“, – sakė Corsaro. „Įsivaizduokite, ar tą patį protokolą būtų galima naudoti ir robotų platformoms, ir autonominiam vairavimui. Manome, kad robotika iš esmės yra ankstyvieji pritaikytojai.
Praėjusį mėnesį „ROSCon“ Kiote, Japonijoje, „ZettaScale“ demonstravo „Cyclone DDS“ ir „Zenoh“, kurių 1.0.2 versija jau yra.
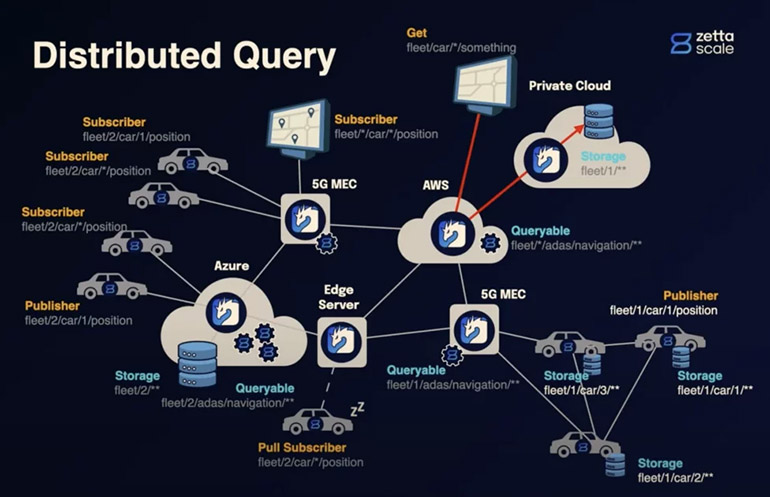
„Zenoh“ supaprastina ryšius, adaptyviai nukreipia duomenis ir paskirsto saugyklą, kad būtų galima efektyviai valdyti parką. Šaltinis: ZettaScale
ZettaScale tęsia automobilių pramonės darbus
Pirmieji „Zenoh“ naudotojai yra pagrindiniai automobilių gamintojai, tokie kaip „Volvo“ ir išmaniųjų miestų įmonės.
„Eclipse Zenoh 1.0.0“ apima bendrinamą atmintį ir nulinės kopijos palaikymą, pažangią apsaugą nuo galo iki galo, didelio našumo prieigos kontrolę ir specifinius robotikos ir automobilių protokolų plėtinius.
„Parodėme, kaip galime tvarkyti savarankiško automobilio vaizdo įrašą realiuoju laiku ir įjungti atpažinimą“, – sakė Corsaro. „Siųsdami lidar vaizdus, taškinius debesis ar didelius vaizdus nenorite eiti per tinklą, tačiau mažai žmonių naudojo nulinės kopijos API (programų programavimo sąsają), esančią ROS.
„ZettaScale“ glaudžiai bendradarbiauja su partneriais Japonijoje ir Europoje, taip pat turi pagalbinį personalą JAV
Source link










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}