











Modeliavimo ir neprisijungus programavimo galimybės apima ne tik apdirbimą, bet ir tokias užduotis kaip surinkimas, apdaila ir suvirinimas. Šioje RoboDK programinės įrangos ekrano kopijoje parodytas modeliavimas, skirtas užtikrinti greitą ir saugų pažangios surinkimo programos programavimą ir diegimą. Kreditas: RoboDK
Pastaraisiais metais robotų apdirbimo populiarumas išaugo dėl mažesnių robotų sąnaudų ir didesnio lankstumo. Palyginti su didelėmis CNC staklėmis, pramoniniai robotai yra palyginti nebrangūs, juos lengva judėti ir juos galima perskirstyti įvairiose programose.
CNC staklės yra auksinis standartas tikslumui svarbiuose sektoriuose, pavyzdžiui, aviacijos ir kosmoso pramonėje, nes jos yra tokios nuspėjamas. Tačiau įmonėms, kurios domisi didelio mišinio / mažos apimties partijomis ir toms, kurios dirba sektoriuose, kuriems netaikomi griežti kosmoso reikalavimai, CNC staklės gali būti per daug suprojektuotas sprendimas.
Medžiagoms, tokioms kaip mediena, putplastis, plastikas, aliuminis ir vis net kietesnės medžiagos, robotai siūlo žymiai pigesnę alternatyvą per daug suprojektuotiems CNC sprendimams, neprarandant būtinos kokybės.
Suprasti roboto sudėtingumą
Kol kas viskas gerai, bet robotai sukuria unikalių sudėtingumo. Pavyzdžiui, nors CNC staklės veikia aiškiai apibrėžtoje stačiakampėje darbo vietoje, roboto darbo vieta yra sferinė ir priklauso nuo jungties. Tai reiškia, kad net jei tikslinis taškas yra roboto pasiekiamoje vietoje, jis gali būti nepasiekiamas reikiama kryptimi.
Šiuos apribojimus galima valdyti, bet tik tada, kai jie yra suprantami iš anksto, o tam reikia, kad galutiniai vartotojai turėtų daug žinių apie robotų ląstelių projektavimą ir programavimą.
Programavimo kliūtis
Laikas, kurio reikia rankiniam robotų apdirbimo programų programavimui, testavimui ir patvirtinimui, yra pagrindinė apdirbimo roboto diegimo kliūtis. Būtent čia programavimo neprisijungus (OLP) programinė įranga, ypač turinti integruotas CAM (kompiuterinės gamybos) galimybes, gali iš esmės pakeisti.
Paprastoms robotų programoms, tokioms kaip paėmimas ir vieta, rankinis programavimas vis dar įprastas. Apdirbimo programos yra labai skirtingos. Jie dažnai reikalauja, kad robotai sektų kelius su šimtais tūkstančių ir net milijonais taškų. Kiekvienas taškas turi būti teisingai išdėstytas, tinkamai orientuotas ir vykdomas be susidūrimų, ašių ribų ar singuliarumo.
Rankiniu būdu apibrėžti tokius kelius žmogiškai neįmanoma. Net ir kukliai sudėtingoms formoms reikalingas tikslumas ir pakartojamumas, kurio programuotojai negali pasiekti rankomis.
Be to, rankiniai metodai yra linkę pasikliauti bandymais ir klaidomis bei pakartotiniais robotinio apdirbimo elemento pakeitimais, kol programa veikia tinkamai. Tai sujungia įrangą, pailgina diegimo terminus dienomis ir savaitėmis ir padidina dalių bei sugadintų įrankių riziką.

Programavimas neprisijungus gali duoti realius rezultatus
Programavimas neprisijungus pašalina varginančius rankinio programavimo reikalavimus ir įrašo kodą, reikalingą jūsų automatinio apdirbimo elementui atgaivinti. Tai pagreitina diegimą ir perskirstymą ir leidžia įmonėms greitai pritaikyti automatizavimą.
Užuot programavęs robote, OLP leidžia galutiniams vartotojams dirbti saugioje virtualioje aplinkoje, kuri atspindi tikrąją ląstelę nuo paties roboto iki įrankių, tvirtinimo detalių, ruošinio ir reikalingų proceso parametrų. Programinė įranga automatiškai generuoja apdirbimo kelius iš CAD modelių, naudodama CAM strategijas, o ne rankiniu būdu užkoduotus taškus.
Naudojant neprisijungus pasiekiamus programavimo įrankius, apdirbimo programas, kurias rankiniu būdu nustatyti prireiktų dienų ar savaičių, galima suprogramuoti, imituoti ir užbaigti per mažiau nei valandą. OLP taip pat leidžia pasiekti sudėtingų geometrijų, kurių neįmanoma pasiekti rankomis. Ši funkcija suteikia galutiniams vartotojams galimybę tyrinėti vaizduotės strategijas ir programas.
Visa tai vyksta be gamybos prastovų, nes roboto ląstelė ir kodas yra patvirtinami ir užprogramuojami neprisijungus prieš įdiegiant. Norite, kad jūsų robotas praleistų laiką apdirbdamas, o ne laukdamas naujausių bandymų ir klaidų instrukcijų iš žmogaus.
OLP programinė įranga, tokia kaip RoboDK CAM, leidžia greitai išbandyti skirtingus roboto kelius, net ir sudėtingose dalyse. Tai suteikia vartotojams galimybę tyrinėti savo kūrybinę pusę. Kreditas: RoboDK
Singuliarumo modeliavimas
Robotai yra linkę į singuliarumus, sąnarių apribojimų pažeidimus ir netikėtus susidūrimus, ypač ankštose ir sudėtingose darbo vietose. Klaidos atliekant apdirbimo programas, susijusias su karščiu arba medžiagų nusėdimu, gali sunaikinti didelės vertės dalis ir reikalauti ilgų regeneravimo procedūrų.
Modeliavimo neprisijungus programinė įranga leidžia inžinieriams aptikti ir išspręsti galimas problemas prieš įdiegiant. Programinė įranga automatiškai įvertina pasiekiamumą, sąnarių judesius, susidūrimo riziką ir proceso tęstinumą visoje įrankių juostoje. O problemos, kurios kitu atveju atsirastų ciklo viduryje, nustatomos ir išsprendžiamos praktiškai.
Integruota CAM svarbu
Ne visi OLP įrankiai vienodai tinka apdirbimui. Kai kurie iš pradžių buvo sukurti robotikai, o vėliau išplėsti, kad būtų galima ribotais būdais apdirbti. Kiti prasidėjo kaip CNC CAM sistemos ir vėliau pridėjo robotų palaikymą.
Integruota CAM yra svarbi, nes robotizuotas apdirbimas nėra tiesiog CNC apdirbimas naudojant kitą ranką. Tam reikalinga koordinuota įrankių orientacijos, medžiagų strategijų ir kartais kelių sinchronizuotų ašių, pvz., patefonų ar padėties nustatymo įtaisų, valdymo.
CAM funkcionalumas įgalina automatinį įrankių kelio generavimą, pažangias kelių ašių strategijas ir medžiagos pašalinimo modeliavimą. Tai leidžia vartotojams matyti ne tik kaip juda robotas, bet ir kaip pati dalis juda apdirbant. Be šios integracijos vartotojai yra priversti ieškoti problemų sprendimo būdų, padidindami laiko sąnaudas, riziką ir bendrą projekto sudėtingumą.

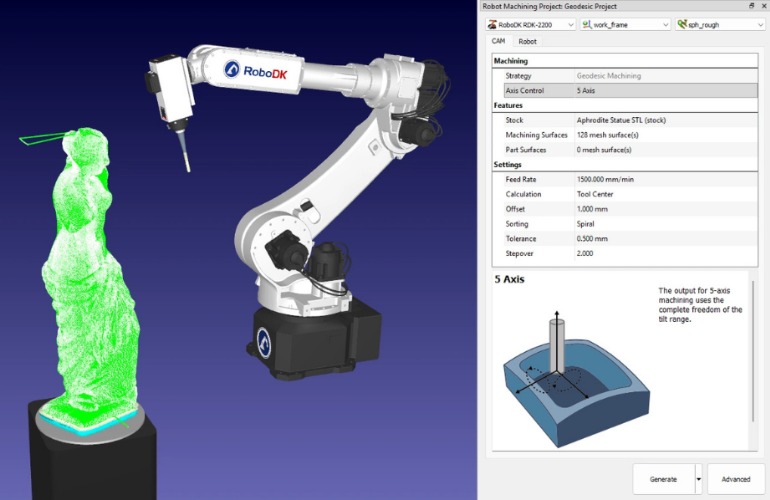
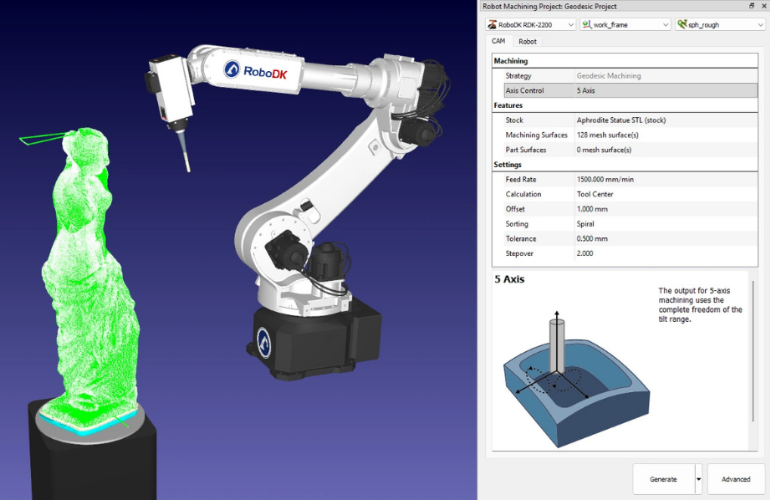
OLP programinė įranga, tokia kaip RoboDK CAM, automatiškai generuoja kodą pagal CAD / CAM dizainą. Tai leidžia apdirbti sudėtingas geometrines figūras, kurių programuoti rankiniu būdu būtų praktiškai neįmanoma. Kreditas: RoboDK
Greitas diegimas didelio mišinio aplinkoje
Neprisijungus naudojama programavimo programinė įranga gali padaryti didelį skirtumą didelio mišinio / mažos apimties gamintojams. Kai kiekvienam apdirbimo darbui keliami skirtingi reikalavimai, programavimas dominuoja visame ciklo trukme. Sutrumpinus sąrankos laiką nuo dienų ir savaičių iki kelių minučių, įmonės gali greičiau atsipirkti iš automatizavimo investicijų.
OLP įrankiai taip pat leidžia eksperimentuoti. Prieš pradėdami fizinę sąranką, inžinieriai gali skaitmeniniu būdu išbandyti skirtingas robotų išdėstymo vietas, įrankių orientacijas ir apdirbimo strategijas. Daugeliu atvejų OLP programinė įranga perkama prieš bet kokią roboto aparatinę įrangą, todėl komandos gali įvertinti galimybes ir išbandyti didžiules robotų ir periferinių įrenginių bibliotekas pagal realaus pasaulio reikalavimus.
Esminiai reikalavimai programavimui neprisijungus
Ne visa neprisijungus veikiančio programavimo programinė įranga yra vienoda, kai kalbama apie apdirbimo programas. Pateikiame trumpą svarbiausių funkcijų, kurių reikia ieškoti, kontrolinį sąrašą:
- Integruotos CAM galimybės
Automatizuotas įrankių kelio generavimas, medžiagų strategijos ir kelių ašių apdirbimo palaikymas. - Tikslus robotų modeliavimas
Singuliarumo, sąnarių ribų, pasiekiamumo problemų ir susidūrimų aptikimas prieš vykdymą. - Medžiagos pašalinimo vizualizacija
Galimybė imituoti, kaip dalis keičiasi apdirbant, o ne tik roboto judėjimą. - Naudojimo paprastumas
Intuityvi programinė įranga sumažina priklausomybę nuo specialistų programuotojų ir sutrumpina mokymosi kreives. - Sinchronizuotų ašių palaikymas
Robotų derinimas su patefonais, padėties nustatymo įtaisais ar išorinėmis ašimis sudėtingoms sąrankoms.
Robotinis apdirbimas atspindi lanksčios gamybos ateitį, tačiau jo sėkmė priklauso nuo to, ar bus atsisakyta „bandymų ir klaidų“, susijusių su mokomuoju pakabuku. Pritaikę naujausią OLP programinę įrangą su integruota CAM, gamintojai gali paversti savaites trunkantį diegimą į trumpesnę nei vienos valandos užduotį. Klausimas nebėra toks: „Ar robotas gali apdirbti dalį? bet “Kaip greitai galite nurodyti tai padaryti?”
Norėdami pamatyti, kaip veikia neprisijungęs programavimas, atsisiųskite RoboDK bandomąją versiją, kad per kelias minutes imituotumėte apdirbimo projektą.

Apie autorę
Albertas Nubiola yra RoboDK, pirmaujančios pramoninių robotų modeliavimo ir programavimo neprisijungus programinės įrangos tiekėjo, įkūrėjas ir generalinis direktorius. Turėdama gilų techninį robotų kalibravimo ir kinematikos išsilavinimą, Nubiola 2015 m. įkūrė RoboDK kaip „École de Technologie Supérieure“ (ÉTS) CoRo laboratorijos padalinį.
Nuo to laiko RoboDK platforma išaugo ir palaiko daugiau nei 1000 robotų ginklų iš 80 skirtingų gamintojų, todėl aukšto lygio automatika yra prieinama bet kokio dydžio įmonėms. Nubiola dažnai prisideda prie robotikos bendruomenės, daugiausia dėmesio skiriant programinės įrangos lankstumo ir gamybos efektyvumo sankirtai.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}