












UR5 kobotas naudoja įtempimo bangą, kad sklandžiai judėtų medžiagų tvarkymo metu. Šaltinis: Universal Robots
Seniai praėjo standžios robotikos laikai, kai rankos trūkčioja ir žvangteli pačiais neintuityviausiais būdais. Šie judėjimai daugelį metų trukdė gamybai ir pramonei, todėl mašinoms eksploatuoti ir prižiūrėti reikia didelių erdvių. Skysčio roboto judėjimas sukėlė žaidimo revoliuciją, suteikdamas galimybę mašinoms veikti ankštesnėse erdvėse su didesniu mobilumu.
Už šių naujovių slypi keli svarbūs komponentai ir technologijos, kurios dažnai nepastebimos.
Skysčio roboto judėjimo svarba
Įprastas robotų judėjimas yra ribojantis, ypač tose srityse, kuriose reikalingas subtilesnis požiūris. Tokiose pramonės šakose kaip chirurgijos mokslas ir reagavimas į ekstremalias situacijas reikalingos lankstesnės priemonės, skirtos padėti darbuotojams pavojingoje ir trapioje aplinkoje. Istorinės mašinos būtų sudėtingos šiose programose ir trukdytų efektyvumui.
Minkšta robotika patikimiau atlieka sudėtingas užduotis, pagerindama žmogaus ir roboto bendradarbiavimą, padidindama patikimumą ir naudingumą.
Be to, skysčių judėjimas palengvina technikos judėjimą ankštose erdvėse arba imituoja biologiškai intuityvesnį judėjimą. Dėl pranašumo įranga yra pritaikoma ir keičiama įvairiose pramonės šakose.
Robotas galėtų atlikti daugiau užduočių, ypač jei jos reikalauja tikslumo ar subtilumo. Dėl platesnio programavimo potencialo ir judesių diapazono robotai gali pasiekti rezultatų atlikdami mažiau žingsnių ir taip sumažinti energijos sąnaudas. Daugelis mechanizmų prisideda prie šių patobulinimų.
5 esminiai skysčių robotikos komponentai
Nors tai nuolat besivystanti sritis su daugybe naujovių horizonte, toliau pateikiami keli iki šiol įtakingiausių minkštųjų robotų mechanizmų pavyzdžiai.
1. Pneumatiniai dirbtiniai raumenys
Palyginti su struktūriniu varikliu, pneumatiniai dirbtiniai raumenys arba PAM yra minkštesnė alternatyva. Mechanizmas plečiasi ir susitraukia kaip plaučiai, manipuliuodamas oru pagal savo judėjimo poreikius.
Kadangi dalis gali nuolat reguliuoti oro talpą, jos judesiai yra ne tokie stiprūs ir intuityvesni. PAM pašalina roboto struktūrinius apribojimus, sukurdami kūną panašesnį į žmogaus.
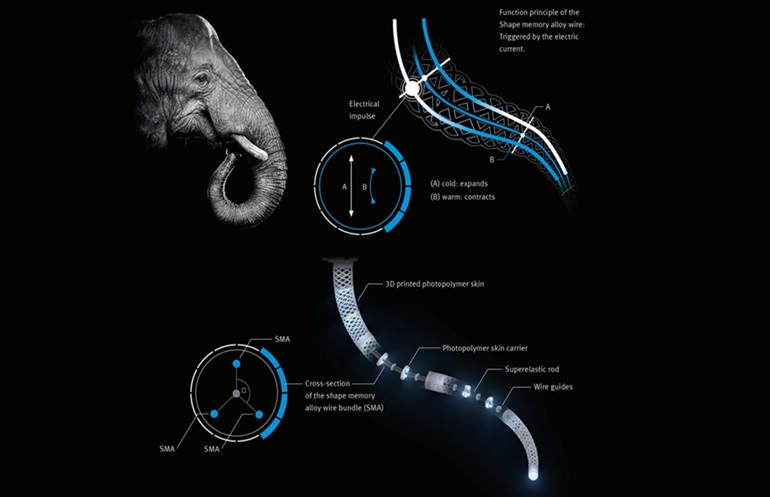
Vienas iš pavyzdžių yra Festo robotas E-Trunk, kurio naujovės įkvėpė tolesnius biomimetinių modelių ir dizaino tyrimus. Rankoje yra daug PAM, kurie naudoja oro slėgį, kad sulenktų ir pasisuktų taip, kaip standartinė roboto ranka niekada negalėtų pasiekti. Jo medžiagoms būdinga savybė, o senesni modeliai tiesiogine prasme atsitrenktų į kliūtis, trindamiesi į savo metalines jungtis.
2. Įtempimo bangos krumpliaračiai
Įtempimo bangos pavaros yra lanksčios tradicinių variklių alternatyvos. Jie leidžia robotams judėti sklandžiau, naudojant dantis ir bangų generatorių, kad būtų užtikrintas elipsinis mobilumas.
Mechanizmas sukuria dizainą be laisvumo, nes lanksčios linijos dantys manipuliuoja apskritu įstrižu su iš anksto įkrauta jungtimi. Visada yra tam tikra įtampa – be virpėjimo – dėl dantų, tačiau vienodas mobilumas pasiekiamas dėl jo konstrukcijos.
Ryškus to pavyzdys yra Universal Robots UR5 serija (žr. paveikslėlį aukščiau).
Įtempimo bangos krumpliaračiai yra esminiai komponentai, didinantys sąnarių elastingumą, tačiau reikia daugiau tyrimų, kad būtų galima išsiaiškinti, kaip sumažinti trintį, kurią gali sukelti tempimo bangų krumpliaračiai. Tačiau reduktoriai gali sumažinti kai kuriuos iš šių problemų.
3. Centriniai modelių generatoriai
Centriniai šablonų generatoriai (CPG) yra neatskiriama roboto valdymo mazgo dalis, pasireiškianti kaip programinė arba aparatinė įranga, paprastai kaip neuroninis tinklas šiuolaikinėse programose. Jie automatizuoja judesių programavimą, atkartodami, kaip veikia stuburas, sukurdami natūralesnius lokomotyvų modelius. Inžinieriai išduoda bangomis pagrįstas komandas CPG, ir jie reaguoja sklandžiai.
Pagrindinis to pavyzdys yra amfibija, vadinama Salamandra Robotica II. EPFL tyrėjai pademonstravo, kaip jo CPG leidžia sklandžiai perjungti plaukimą ir vaikščiojimą.
4. Elektroaktyvūs polimerai
Elektroaktyvūs polimerai (EAP) yra pagrindinė medžiaga roboto skysčio judėjime, o ne atskira dalis. Jie laikomi išmaniosiomis medžiagomis, nes gali atkartoti raumenų judesius be mechaninio poveikio, pašalindami įprastus skausmo taškus, tokius kaip judesiai su stulpeliais arba perteklinio tepimo poreikį.
Vietoj to EAP reaguoja į elektrinius dirgiklius, pakeisdami jų formą, kad atitiktų naudojimo atvejį. NASA sukūrė robotą sugriebimo mašiną su pirštais, pagamintais iš EAP dar 1999 m.

5. Formos atminties lydiniai
Formos atminties lydiniai (SMA) yra metalai, kurie yra kaip fazės keitimo medžiagos, nes gali keisti formą, kai yra veikiamos šilumos ar elektros paleidimo. Pritaikius dirgiklį, jis gali išlikti tam tikros formos, kol bus nurodyta grąžinti pradinę formą. Tai galėtų sumažinti lankstiems robotams reikalingų dalių skaičių, nes SMA gali prisitaikyti prie užduoties realiuoju laiku.
SMA daro judėjimą sklandesnį, reguliuodami komponentus molekuliniu lygiu, todėl robotas tampa dinamiškiausia savo versija. Harvardo mokslininkai siūlo šiuos įrankius nešiojamai robotikai, padedančius žmonėms sulenkti alkūnę ir dilbį, o tai gali būti naudinga kasdieniame gyvenime ar pramonėje.
Atpažinkite sklandaus roboto judėjimo technologijas
Šie pavyzdžiai yra tik keletas pagrindinių naujovių, slypinčių šios kartos robotų judėjimo įsivaizdavime. Daugelis kitų techninių stebuklų prisideda prie šių lanksčių ir pritaikomų mašinų, kurios visam laikui keičia pramonės veiklą.
Žinodami paslėptus žaidėjus už šios pažangos, robotikos kūrėjai ir integratoriai gali atrasti būdų, kaip toliau tobulinti ateities robotų planus, kad jie būtų dar mobilesni ir pajėgesni.
 Apie autorę
Apie autorę
 Apie autorę
Apie autoręLou Farrellas, vyresnysis Revolutionized redaktorius, daugelį metų rašė robotikos, kompiuterijos ir technologijų temomis. Jis labai mėgsta savo aprašytas istorijas ir apskritai rašymą.
Šis straipsnis paskelbtas gavus leidimą.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}