











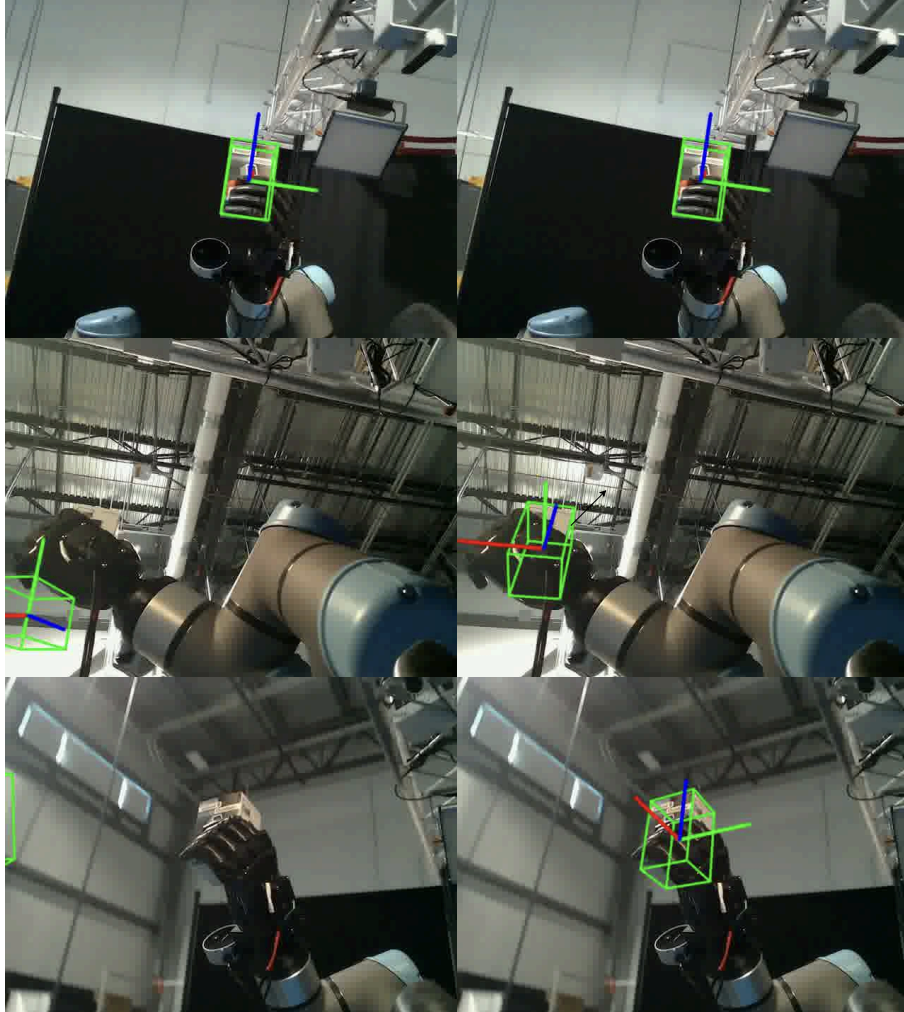
„Vita-Zero“ apžvalga, nulinio šūvio visuototactile pozos įvertinimo sistema. | Kreditas: „Amazon“ robotika
Objekto 6D pozos įvertinimas yra kritinis robotikos iššūkis, ypač atliekant įvairias manipuliavimo užduotis. Nors ankstesni tyrimai, derinantys vaizdinę ir lytėjimo (visuototactile) informaciją, parodė pažadą, „Amazon Robotics“ teigė, kad šie metodai dažnai kovoja su apibendrinimu dėl riboto visuototactile duomenų prieinamumo.
Neseniai „Amazon Robotics“ pristatė „Vita-Zero“-„Zero-Shot“ vizuototactile pozos įvertinimo sistemą. „Amazon Robotics“ teigė, kad pagrindinė naujovė yra vizualinio modelio panaudojimas kaip jo stuburas ir galimybių tikrinimo tikrinimo ir bandymo laiko optimizavimas, pagrįstas fiziniais apribojimais, gautais iš lytėjimo ir propriocepcinių stebėjimų. Tiksliau, šis požiūris modeliuoja griebtuvo-objekto sąveiką kaip pavasario ir masės sistemą, kur lytėjimo jutikliai sukelia patrauklias jėgas, o propriocepcija sukuria atstumiančias jėgas.
„Amazon Robotics“ teigė, kad ji patvirtino sistemą atlikdamas eksperimentus su realaus pasaulio roboto sąranka, parodydama jo veiksmingumą reprezentatyviuose vaizdiniame stuburo ir manipuliavimo scenarijuose, įskaitant sugriebimą, objektų rinkimą ir bimanualinį perdavimą. Palyginti su vaizdiniais modeliais, „Amazon“ teigė, kad jo požiūris įveikia kai kuriuos drastiškus gedimo režimus, stebint objekto pozą rankoje.
Eksperimentuose tyrėjai teigė, kad šis metodas rodo vidutinį 55% padidėjimą plote, esant ADD-S kreivei (AUC) ir 60% ADD, kartu su 80% mažesne padėties paklaida, palyginti su fondo PSOUP. Komanda teigė, kad ji taip pat atliko išsamius abliacijos tyrimus, siekdama įvertinti įvairių dizaino pasirinkimų, įskaitant skirtingas nuostolių funkcijas, tobulinimo algoritmus ir optimizavimo inicijavimo metodus, poveikį. Ateities darbui planuojame įvertinti daugiau objektų formų ir integruoti savo pozos įvertintoją į manipuliavimo politiką, kad įvertintume jo poveikį bendram manipuliavimo užduotims atlikimui.
Atsisiųskite žemiau esantį dokumentą, kad atrakintumėte visą informaciją už „Vita-Zero“ proveržio metodą. Sužinosite apie jo pavasario ir masės vizuotoctile sąveikos modelį su eksperimentiniais rezultatais, kurie įrodo jo pritaikomumą nuliniame šūvyje. Jei jus domina robotų suvokimo ir manipuliavimo ateitis, sužinokite, kaip „Vita-Zero“ peržengia tai, kas įmanoma, visuotinėje dirbtiniame intelekte.

Spustelėjęs aukščiau „Pateikti“ ir registruodamas šį turinį, aš pripažįstu ir sutinku su „WTWH Media“ taisyklėmis ir nuostatomis bei „WTWH Media“ naudojimąsi savo kontaktine informacija, kad bendrautų su manimi apie „WTWH Media“, jos prekės ženklų, filialų ir (arba) trečiųjų šalių partnerių, susijusių su WTWH žiniasklaidos privatumo politika. Be to, aš suprantu, kad mano asmeninė informacija gali būti dalijamasi su bet kuriuo turinio rėmėju (-ais) ir kad jie gali tiesiogiai susisiekti su manimi apie savo produktus ar paslaugas. Norėdami gauti daugiau informacijos apie tai, kaip jūsų informacija naudos jūsų informaciją, skaitykite tokio rėmėjo (-ų) privatumo politikoje.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}