











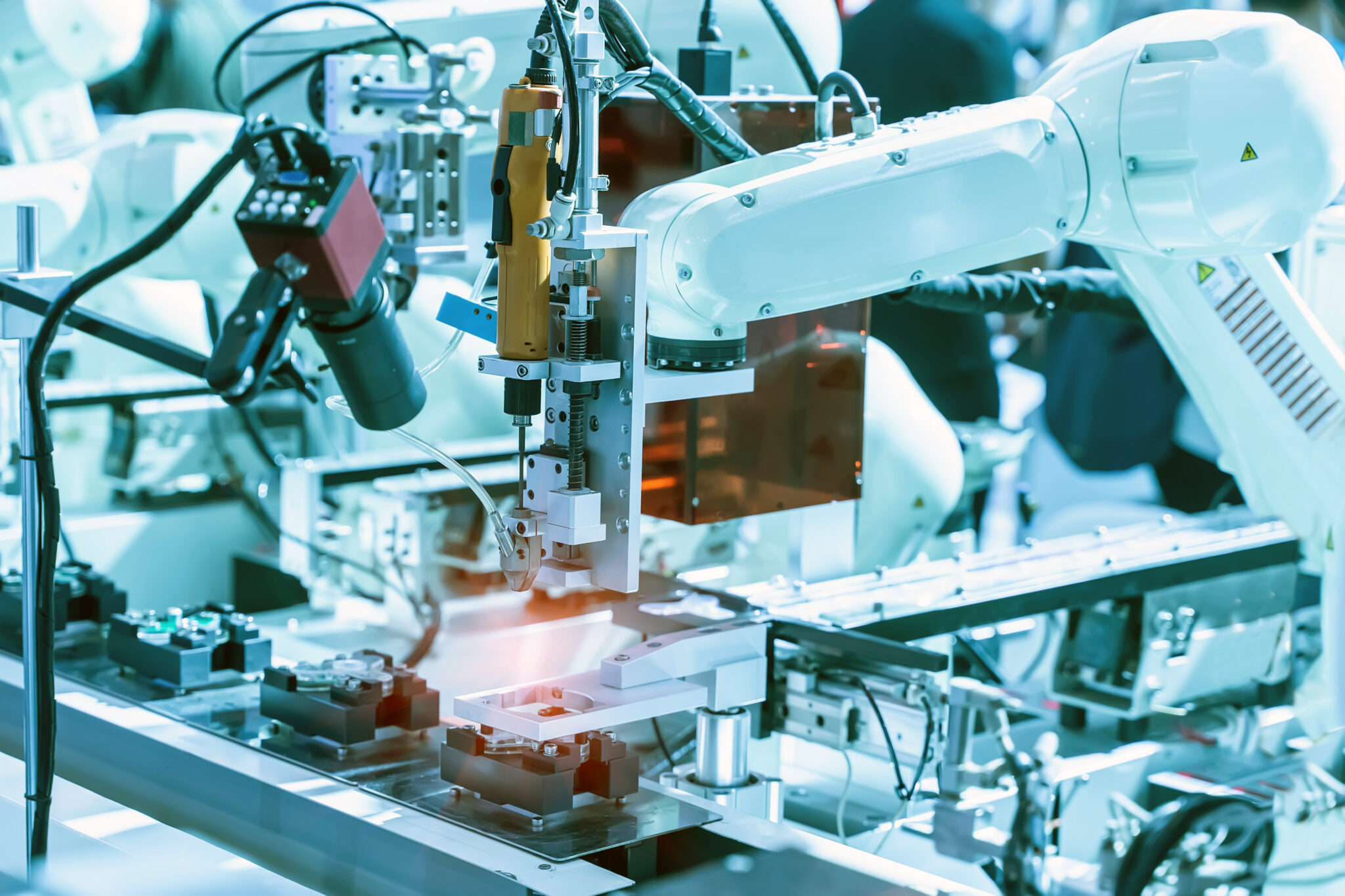
Valdymas judesiu įgalina naujus roboto tikslumo lygius. Šaltinis: Adobe Stock
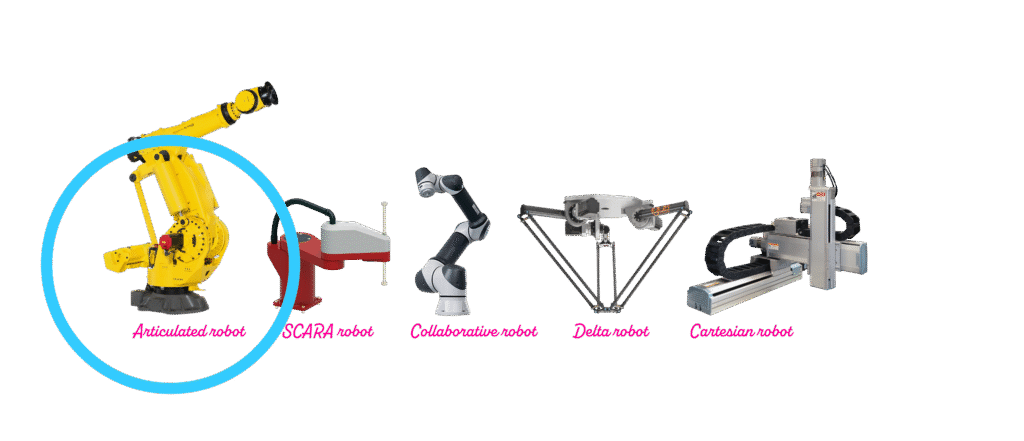
Šiomis dienomis daug dėmesio sulaukia pramoniniai robotai ir jų judesio komponentų integravimas bei įtraukimas į darbo ląsteles su kita judesiais pagrįsta automatizuota įranga. Tokiose robotizuotose darbo ląstelėse taip pat yra konvejeriai, regėjimo sistemos ir mašinos, skirtos tam tikroms užduotims automatizuoti.
Taigi, kas daro judesio sistemą robotu ar mašina? Kitaip tariant, kuo skiriasi judesio sistemos, naudojamos automatizuotose mašinose, ir robotų pavidalo sistemos? Pastarieji gali automatiškai vykdyti sudėtingas ir programuojamas (o ypač perkonfigūruojamas) judesių sekas.
Tiesa, šis apibrėžimas yra gana neaiškus ir net ISO 8373 apibrėžimas galėtų apibūdinti mašinas, kurios paprastai nelaikomos robotais. Jame teigiama, kad robotas yra „automatiškai valdomas daugiafunkcis manipuliatorius“, perprogramuojamas trimis ar daugiau ašių.

Šioje „igus“ sąrankoje yra AI varomas mašinos matymas.
Priešingai nei robotai, automatai, tokie kaip pardavimo automatai (norint pateikti tik vieną pavyzdį), yra skirti vienam tiksliai apibrėžtam naudojimui vienoje fiksuotoje vietoje. Jie gali atlikti užduotis su skirtingais ruošiniais, bet greičiausiai nebus perprogramuoti keliems tikslams. Aparatai naudojami tik vienam tiksliai apibrėžtam įsigytų produktų išdavimo naudojimui.
Dekarto robotikos forma taip pat susideda iš linijinio judesio komponentų, tokių kaip linijiniai kreiptuvai, rutuliniai sraigtai ir koduotuvai, arba iš anksto integruotų pavarų ar net linijinių variklių, kaip parodyta toliau pateiktame didelės spartos mazge. Tačiau, kaip ir šarnyrinė ir SCARA robotika, jie labiau gali atlikti įvairias prisitaikymo funkcijas.
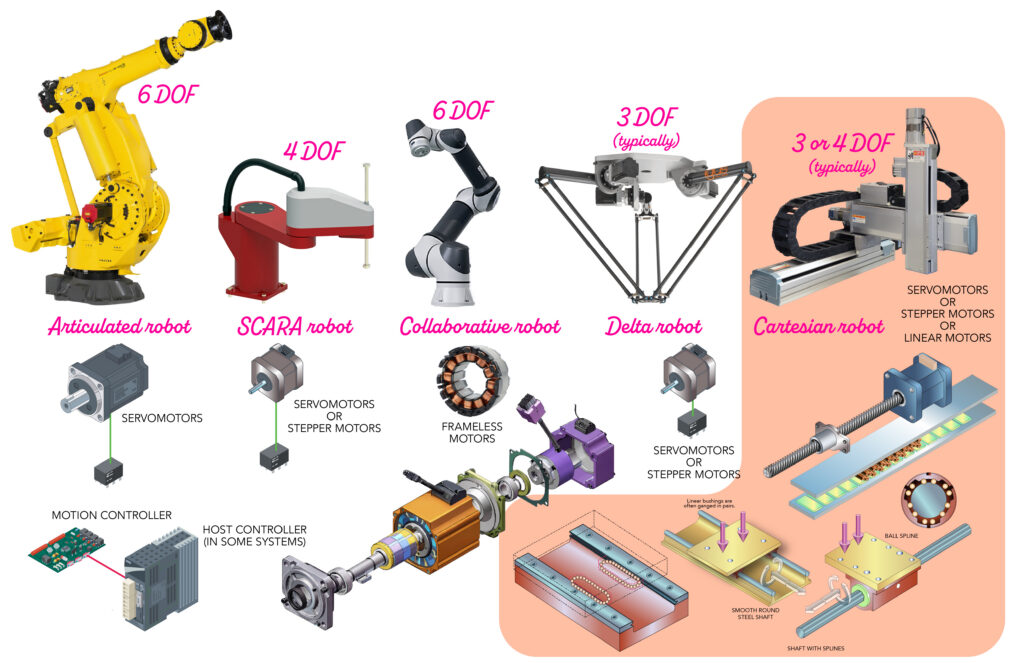
Tipinės technologijos kiekvienam roboto tipui
Tiesą sakant, kai kurios pavaros, varikliai ir valdymo technologijos yra įprastos šarnyrinėms ir SCARA robotikoms bei Dekarto sistemoms. Šios stacionarios sistemos – dažnai tai, ką reiškia nuorodos į „pramoninius robotus“ – netgi dalijasi pagrindinėmis technologijomis su automatizuotomis valdomomis transporto priemonėmis (AGV).
Daugiau informacijos apie AGV rasite adresu Roboto ataskaita, automatizuotas sandėlis, ir Dizaino pasaulis. Tačiau kelių ašių judesio sinchronizavimo su roboto kinematika strategijos skiriasi.
Susiję: Pirmaujančios robotikos judesio valdymo ir paleidimo galimybės
Svarbiausia yra sumažinti vėlavimą, sudėtingumą ir išlaidas, susijusias su medžiagų tvarkymu, mašinų priežiūra ir kitomis sąrankomis, kuriose yra robotika kartu su kitų tipų judėjimo sistemomis.
Judėjimo komponentų tiekėjai = robotų tiekėjai
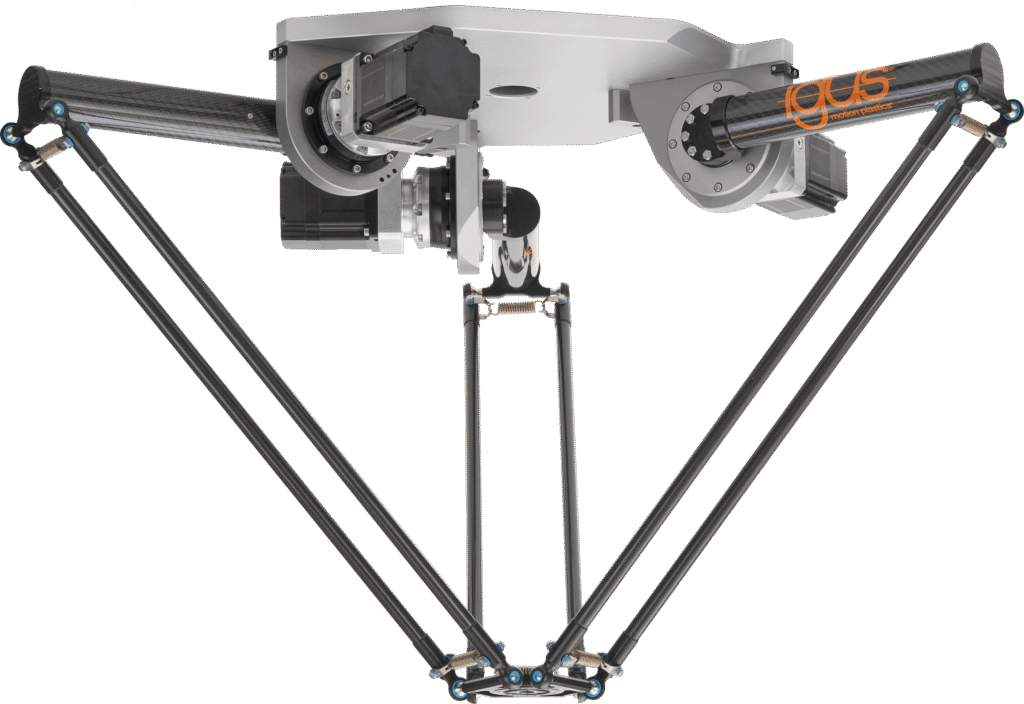
RBTX trijų doF delta robotas. Šaltinis: igus
Kadangi robotika yra tik judesio sistemų dizaino pogrupis, nenuostabu, kad daugelis judesio komponentų tiekėjų siūlo visiškai iš anksto integruotus savo robotus. Kiti palaiko robotikos projektavimą ir integravimą su posistemėmis, pritaikytomis robotų operacijoms.
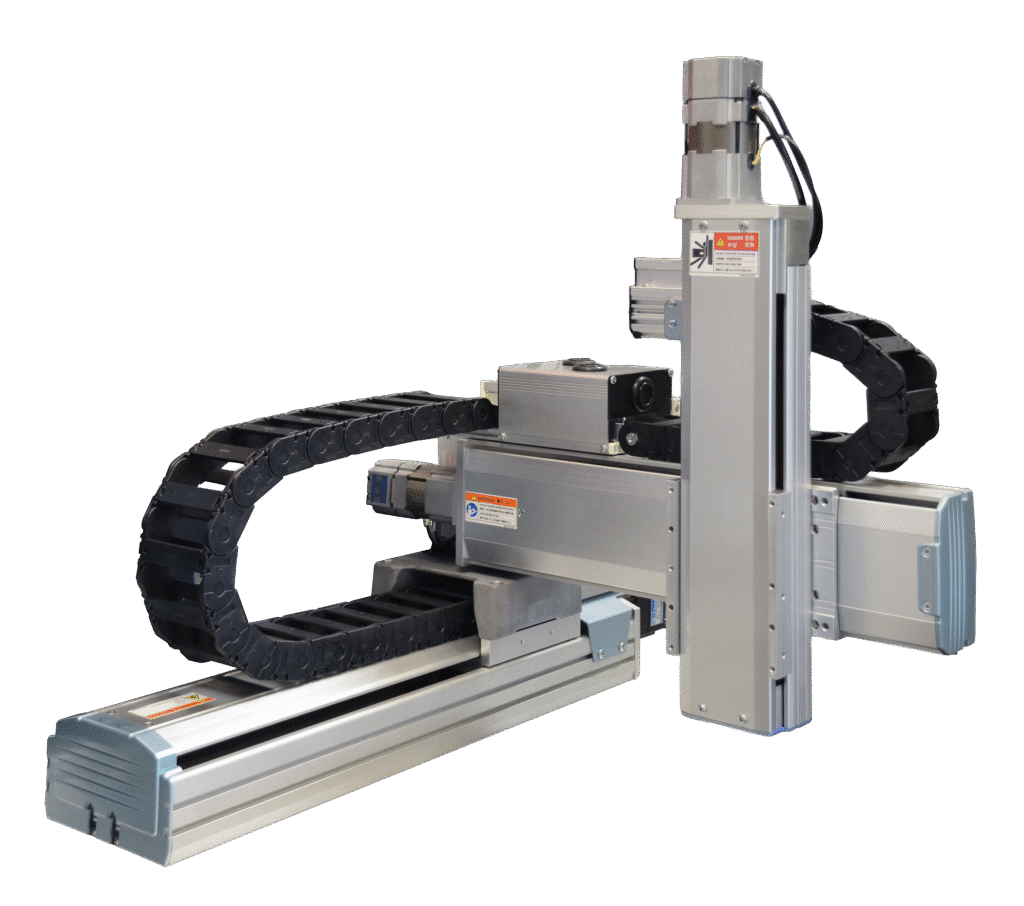
Šiame Dekarto robote yra PHD pavaros ir linijiniai slankikliai. Tokie etapai yra gana moduliniai ir ypač paplitę pakuotėse. Šaltinis: PHD Inc.
Tiesą sakant, kai kurie tiekėjai siūlo motorizuotas ašis ir judesio sprendimus kiekvienam robotų tipui, naudojamam pramonėje. Patvirtinti, pigūs variantai gali teikti pirmenybę sukonstruotiems plastikiniams komponentams (taip pat tiekiamiems atskirai), todėl jie gali būti naudojami ne visoms programoms.
Be to, daugelis šių sprendimų veikia mokslinių tyrimų, maisto ir gėrimų, pardavimo, vartotojų aptarnavimo, laboratorijų automatizavimo ir kitose ekonomiškai jautrios automatikos srityse.

Lengvoji pramoninė roboto ranka su mėgintuvėliu. Šaltinis: Adobe Stock
Žingsniniai varikliai (ir ypač uždaro ciklo žingsniniai) taip pat tinka Dekarto ir SCARA stiliaus robotams, naudojamiems lengviems surinkimams ir laboratorijų automatizavimui, įskaitant spausdintinės plokštės (PCB) krautuvus ir bandymo įtaisų robotus.
Uždarojo ciklo žingsniniai varikliai (su kodavimo įrenginiais) dažniau suteikia judesį mazgų jungtims, perkeliančioms iki 3 kg (6,6 svaro) arba daugiau, arba griebtuvus, įrankių keitiklius, regėjimo mechanizmus arba suvirinimo degiklio padavimo įrenginius.
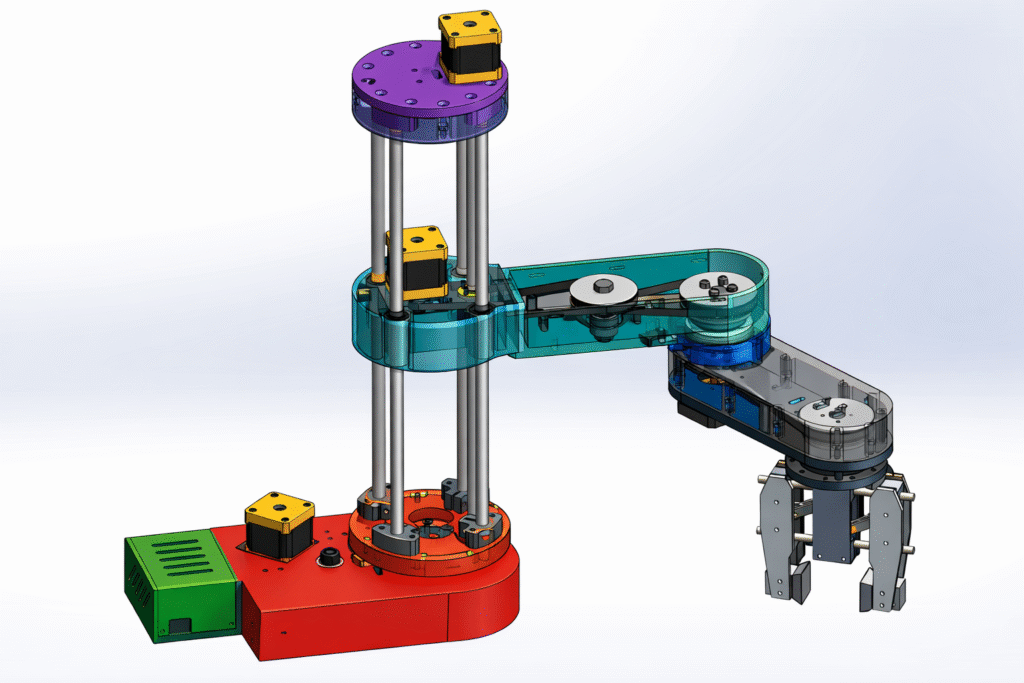
Šiame prieinamame SCARA agregate yra žingsniniai varikliai, diržinės pavaros ir varžtais varoma vertikali ašis su paprastais linijiniais kreiptuvais.
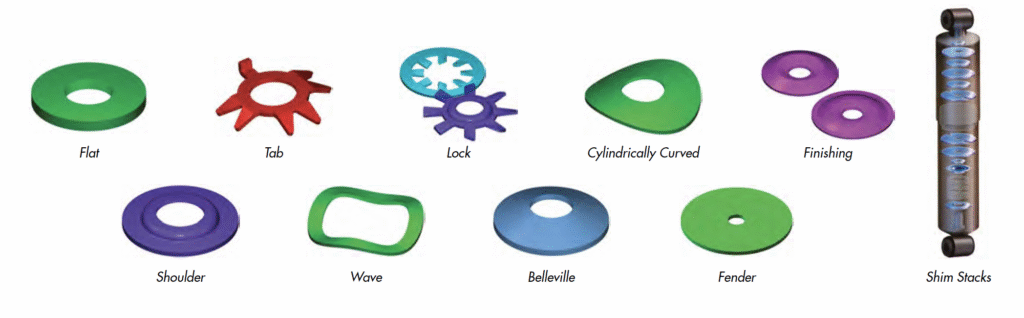
„Boker's“ palaiko robotiką su pritaikytomis poveržlėmis, tarpikliais ir tarpikliais, skirtais guolio išankstiniam apkrovimui, bėgių išlygiavimui, pavarų dėžės atstumui, galinio veiksmo mechanizmo tvirtinimo poslinkiams ir jutiklių atitvaroms. Šie komponentai pasižymi mažomis leistinomis nuokrypomis ir pasikartojančiomis medžiagos savybėmis. Šaltinis: Boker's
Iki smulkiausių komponentų – įskaitant poveržles, tarpiklius, tarpiklius ir tvirtinimo elementus. Pavyzdžiui, šie elementai išlaiko agregatą, tuo pačiu užkertant kelią kaupimo klaidoms, dėl kurių gali atsirasti surišimas, kampinis nesutapimas arba įrankio centro poslinkis.
Delta robotai turi unikalią kinematiką ir dinamiką
Delta arba voratinkliniai robotai yra jų pačių veislė, kurios kinematika pasižymi NEMA žingsninėmis sraigtinėmis pavaromis … arba kiekvienos jungties diržine pavara. Kitu atveju daugelyje pramoninio lygio trikampių (kaip ir atliekant paėmimo ir pakėlimo užduotis) yra nuolatinio magneto servovarikliai (su spiraline arba planetine pavara) kiekvienai lygiagrečiai jungčiai.
Žemiau parodytame nerūdijančio plieno trikampio roboto jungtys tiesiogiai pritvirtinamos prie servovariklio išėjimo velenų. Pavarų skaičius yra mažas, nes pats mazgas suteikia didelę dinamiką.
Delta robotų krumpliaračiai spiralinė pavara sumažina vibraciją, tačiau planetinė pavara yra ypač didelė.
Įprastos robotų rankos turi šešis laisvės laipsnius
Šarnyrinės šešių laisvės laipsnio (DoF) robotų rankos yra tai, ką dauguma pasauliečių įsivaizduoja, kai jų prašoma užburti pramoninę roboto ranką. Jie turi nuoseklias jungtis su darbo apvalkalu, kurį varžo jungtys. Jie apibrėžiami pagal maksimalų galutinio efektoriaus XYZ pasiekiamumą kartu su θX, θY, θZ diapazonais.
Įprasta naudoti peties, alkūnės ir riešo analogijas, nurodant laisvės laipsnius. Ištiesinus alkūnės sąnarį, riešas yra toliausiai nuo pagrindo, o galinis efekto elementas yra mažiau naudingas. Sulenktas alkūnės jungtis priartina galinį efektorių prie pagrindo, kad būtų galima geriau orientuotis.
Šarnyriniai robotai puikiai manevruoja ruošiniais per nesuderintas stotis ir paviršius.
6-D0F robotams (taip pat SCARA, kuriuos aptarsime toliau) kiekviena jungtis turi nustatytą vardinį pakartojamumą. Tačiau bendras pakartojamumas galutiniame efektoriuje priklauso nuo jo padėties erdvėje, o tolimiausiuose taškuose yra blogiausios vertės. Taigi, darbo langelio išdėstymas yra geriausias, kai objektai yra gerai pasiekiami ranka ir nereikia jokių sąnarių, kad būtų visiškai ištiesinta.
Judėjimas SCARA sistemose
SCARA robotai turi trijų arba keturių ašių kinematiką ir valdymo įrangą, skirtą montuoti spintelėje arba ant DIN bėgio. Jie puikiai tinka rinkti ir padėti laboratorijoje. Šaltinis: igus
Atrankinio atitikties surinkimo robotų rankos (SCARA) yra kito tipo šarnyrinės sistemos su nuosekliomis jungtimis. Tai leidžia atlikti rinkimo ir padėjimo užduotis, perkeliant ruošinius nuo vieno konvejerio ar kito plokščio paviršiaus ant kito, ypač jei darbo elementas leidžia SCARA išdėstyti centre. Jų pralaidumas yra nedidelis arba vidutinis, o diegimas nepateisins daugelio pritaikymų – pavyzdžiui, įterpimo ar prispaudimo funkcijų.

„Viskas viename“ SCARA konkuruoja su karteziečiais ir aptarnauja vidutinės klasės programas.
SCARA galima įsigyti kaip paruoštus, trijų ar keturių doF sprendimus… arba kinematiką galima kurti viduje.
Kitas privalumas: SCARA, kaip ir kiti šarnyriniai robotai, dažnai turi patogius maitinimo, kodavimo signalų, įvesties / išvesties laidus ir pneumatines linijas nuo pagrindo iki galinio efektoriaus.

Pramoninės SCARA jungtys paprastai apima kintamosios srovės servovariklius su absoliučiaisiais kodavimo įrenginiais, kad būtų galima gauti grįžtamąjį ryšį net tada, kai nutrūksta ir atkuriama pagrindinė maitinimas. Encoderiai be baterijų gali padėti SCARA padaryti kompaktišką. Dar daugiau kompaktiškumo (ir pasiekiamumo gaubto) galimas naudojant gerai integruotą jungties krūvą – variklį, guolį ir krumpliaračio laikiklį, kurių ašinis ilgis yra minimalus.
Planetinės krumpliaračių galvutės suteikia sukimo standumo ir efektyvumo bei kompaktiškumo, kad tilptų į jungtis. Nėra tokio elastingo apvyniojimo, kuris susietas su tam tikromis įtempimo bangos pavaromis. Taigi, valdiklis gali išlaikyti aukštą pakartojamumą be agresyvių kompensavimo algoritmų.
Taip pat dažnai naudojami apsauginiai stabdžiai galinėse jungtyse (J3 ir J4). Z ašyje (kaip ir tipiškame „Epson“ robote) naudojamas rutulinis varžtas su rutuliniu sruogeliu. Toliau pateiktas igus pavyzdys yra šiek tiek kitoks: jis turi diržu varomą Z ašį su dviem linijiniais kreiptuvais.

Šis robotas turi diržu varomą Z ašį su dviem linijiniais kreiptuvais. Šaltinis: igus
Redaktoriaus pastaba: Šis straipsnis yra sindikuotas iš Roboto ataskaita brolių ir seserų svetainė Dizaino pasaulis.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}