












„OpenRobOps“ naudojantys kūrėjai gali pereiti prie „InOrbit Ground Control“, kai keičiasi masteliu. Šaltinis: InOrbit
Kad mobiliųjų robotų parkų mastelis padidėtų, jiems reikia robotų operacijų įrankių. „InOrbit Inc.“ šiandien paskelbė, kad prisidės prie „OpenRobOps“ prie atvirojo kodo bendruomenės. Bendrovė taip pat paskyrė pramonės veteraną Steve'ą Cousinsą į savo direktorių tarybą, kad vadovautų šioms pastangoms.
Anot InOrbit.AI, robotų kūrėjai turėjo pasirinkti, ar kurti patentuotus automobilių parko valdymo įrankius arba paaukoti kontrolę, kai susiduriama su dilema „statyti prieš pirkimą“.
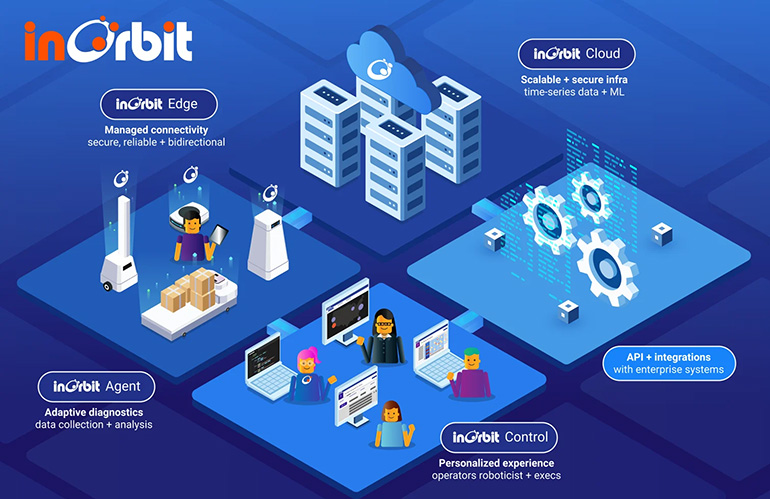
„Kalbėjausi su per daug robotikos įkūrėjų, kurie iš naujo išranda dviratį ir nesugeba padidinti masto“, – teigė Florianas Pestoni, „InOrbit“ įkūrėjas ir generalinis direktorius. „Pagrindinių operacijų lygmenyje teikdami atvirojo šaltinio šaltinius, įgaliname kūrėjus turėti savo duomenų ir infrastruktūros nuosavybę. Galutiniai vartotojai gali lengviau organizuoti robotus tarp tiekėjų, naudodami InOrbit Space Intelligence – mūsų apdovanojimus pelniusią dirbtinio intelekto platformą.
„OpenRobOps“, kad padėtų kūrėjams valdyti robotus dideliu mastu
„InOrbit“ teigė, kad sukūrė „OpenRobOps“ (ispaniškai ORO arba „auksas“) savo patikrintoje platformoje, kuri jau valdė tūkstančius autonominių mobiliųjų robotų (AMR). „Mountain View“, Kalifornijoje, įsikūrusi bendrovė planuoja vėliau šiais metais pasiūlyti programinę įrangą pagal visą atvirojo kodo licenciją.
„ORO suteiks kūrėjams skaidrų, savarankišką robotų stebėjimo ir valdymo pagrindą, demokratizuodamas prieigą prie bendros infrastruktūros, reikalingos robotams eksploatuoti dideliu mastu.

Šaltinis: InOrbit
Kaip „InOrbit“ nustatė, ką padaryti atvirojo kodo ir ką palikti savo komerciniame pasiūlyme?
„Mes kūrėme ir tobuliname „InOrbit“ jau keletą metų, dirbame su daugybe vartotojų ir tobuliname RobOps koncepciją arba roboto operacijas“, – atsakė Pestoni. Roboto ataskaita. „Mes nustatėme pagrindines, bendras funkcijas, kurių dauguma žmonių ieško, kai jiems reikia mobiliųjų robotų parko valdytojo.
„Apžiūrėdami atvirojo kodo robotikos ekosistemą nustatėme didelę spragą: reikia transporto parko valdytojo, kuris sklandžiai veiktų su ROS įrenginyje ir atvira RMF kaip koordinavimo sistema“, – pridūrė jis. „OpenRobOps užpildo šią spragą“.
Kūrėjai, norintys išplėstinių funkcijų ir palaikymo, gali naudoti „InOrbit Ground Control“. Bendrovė teigė, kad tai gali padėti jiems atnaujinti, kai jų poreikiai auga arba pereiti nuo prieglobos prie savarankiškai valdomų sistemų, nekeičiant pagrindinės duomenų architektūros.
„Manau, kad tai bus pagrįsta tai, kam naudotojai teikia pirmenybę. „InOrbit Ground Control yra visiškai valdomas, debesies pagrindu veikiantis, labai keičiamas sprendimas, kuris veikia iš karto ir leidžia įmonėms sutelkti visą savo dėmesį į robotų diegimą dideliu mastu“, – sakė Pestoni. „OpenRobOps teikia kūrėjams, tiek pramonėje, tiek akademinėje bendruomenėje, kad jie galėtų visiškai valdyti duomenis ir patirtį galutiniams vartotojams.
Cousins suteikia atvirojo kodo patirtį
Steve'as Cousinsas yra Stanfordo robotikos centro vykdomasis direktorius ir steigėjos valdybos narys
Atvirojo kodo robotų fondas (OSRF). Cousinsas padėjo vadovauti robotų operacinės sistemos (ROS) kūrimui ir sklaidai, būdamas Willow Garage generaliniu direktoriumi, ir jis buvo vienas pirmųjų novatorių, komercializavusių ROS kaip Savioke (vėliau Relay Robotics) įkūrėjas, pažymėjo InOrbit.

Šaltinis: InOrbit
„InOrbit atlieka laivyno operacijas tai, ką ROS padarė robotų kūrimui“, – sakė Cousinsas.
„Savioke buvo ankstyvas „InOrbit“ klientas, todėl iš pirmų lūpų pamačiau platformos vertę“, – prisiminė jis. „Prisijungiau prie valdybos, nes matau, kad reikia platesnei robotikos bendruomenei: norint atverti kitą naujovių ir masto bangą, būtina standartizuoti bendrą infrastruktūrą.
“Steve'as Cousinsas yra pagrindinė robotų ekosistemos figūra. Būdamas Willow Garage prezidentas ir generalinis direktorius, jis vadovavo komandai, kuri pristatė modernius, autonominius robotus”, – sakė Pestoni. „Steve'as suteikia „InOrbit“ direktorių tarybai daug žinių ir yra tvirtas „OpenRobOps“ atvirojo kodo iniciatyvos rėmėjas.
Bendruomenė sveikina „InOrbit“ veiksmus
„InOrbit“ teigė, kad jau dirba su partneriais iš akademinės bendruomenės, pramonės ir paslaugų teikėjų prieš išleisdama bendrą „OpenRobOps“. Keli žymūs robotikos lyderiai pasveikino ORO pranešimą.
„OpenRobOps atlieka svarbų vaidmenį atvirojo kodo robotikos ekosistemoje, suteikdama parko valdytojui vietinį ROS ir Open RMF palaikymą“, – sakė Geoffrey Biggs, Open Robotics vyriausiasis technologijų pareigūnas (CTO).
„Alphabet“ bendrovės „Intrinsic“ technikos vadovas Brianas Gerkey teigė, kad yra patenkintas, kad robotai buvo papildyti bendraisiais įrenginiais. „Robotų tyrinėtojai išradinėdavo dviratį iš naujo, kol atsirado ROS ir parūpino pagrindinius statybinius blokus“, – sakė jis. „Dabar „OpenRobOps“ suteiks panašių blokų automobilių parko valdymui.
Kärcher naudojo InOrbit Ground Control, kad padidintų savo KIRA grindų šveitimo mašinų parką. „OpenRobOps suteikia robotikos įmonėms visame pasaulyje prieigą prie komercinio lygio operacijų programinės įrangos, kuri yra tikras žaidimų keitiklis pramonei“, – sakė Kärcher robotų sistemų direktorius Felipe Garcia Lopez.
Florencia Grosso, Ekumen verslo direktorė, sakė, kad ORO padės pasaulinio lygio transporto priemonių parko valdymui pritaikyti ROS ekosistemą. „OpenRobOps pagreitina perėjimą nuo laboratorijos prie realaus pasaulio kaip standartinis transporto parko valdymo sluoksnis, savaime integruojantis su ROS ir Open RMF“, – pridūrė ji.
Kiti rėmėjai yra Dr. Lorenzo Masia, Miuncheno technikos universiteto (TUM) Miuncheno robotų ir mašinų intelekto instituto (MIRMI) vykdomasis direktorius, ir Ricardo Petrazzini, Robotic Crew generalinis direktorius.
„Atvirojo kodo projektai yra tik tiek stiprūs, kiek stipri jų bendruomenė“, – pažymėjo Pestoni. „Tęsdami OpenRobOps išleidimo procesą, dalinsimės papildomais kanalais, kad galėtume bendrauti su platesne bendruomene, tiek internetu, tiek kasmetiniame RosCon renginyje.
2025 m. rugsėjį padidinusi A serijos finansavimą, „InOrbit“ planuoja atverti prieigą prie „OpenRobOps“, kad pirmiausia atrinktų ankstyvuosius naudotojus, o vėliau šiais metais – plačiajai visuomenei.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}